Приводы и позиционеры регулирующих клапанов
Для работы регулирующим клапанам необходимы приводы. В этом материале кратко рассматриваются различия между электрическими и пневматическими приводами, связь между терминами direct acting и reverse acting и то, как это влияет на регулирующее воздействие клапана. Также объясняется важность positioners, их функции и причины, по которым они требуются во многих применениях.
Приводы В Block 5, ‘Controls Theory’, для описания простого управления процессом использовалась аналогия:
• мышца руки и кисть (привод) поворачивали клапан - (управляемое устройство).
Одна из форм управляющего устройства, регулирующий клапан, уже рассмотрена. Следующей логичной темой становится привод.
Работа регулирующего клапана заключается в позиционировании его подвижной части (тарелки, шара или заслонки) относительно неподвижного седла. Назначение привода клапана - точно установить тарелку клапана в положение, задаваемое управляющим сигналом.
Привод принимает сигнал от системы управления и в ответ перемещает клапан в полностью открытое или полностью закрытое положение либо в промежуточное, более открытое или более закрытое положение (в зависимости от того, используется ли режим ‘on/off’ или ‘continuous’ control).
Существует несколько способов обеспечить это перемещение. В данном модуле основное внимание уделено двум главным вариантам:
- пневматическому;
- электрическому.
Другие важные типы приводов включают гидравлические и самодействующие. Они рассматриваются в Block 7, ‘Control Equipment: Self-Acting Controls’.
Пневматические приводы - работа и варианты
Пневматические приводы широко используются для управления регулирующими клапанами и доступны в двух основных исполнениях: поршневые приводы (Figure 6.6.1) и мембранные приводы (Figure 6.6.2).
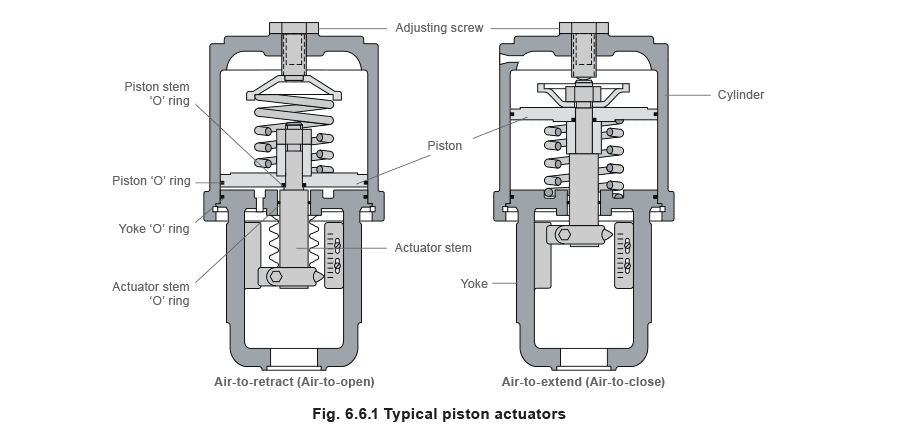
Поршневые приводы Поршневые приводы обычно применяются там, где ход мембранного привода был бы слишком коротким или развиваемое усилие оказалось бы недостаточным. Сжатый воздух подаётся на жёсткий поршень внутри жёсткого цилиндра. Поршневые приводы могут быть single acting или double acting, выдерживают более высокое входное давление и имеют меньший объём цилиндра, что позволяет им работать на высокой скорости.
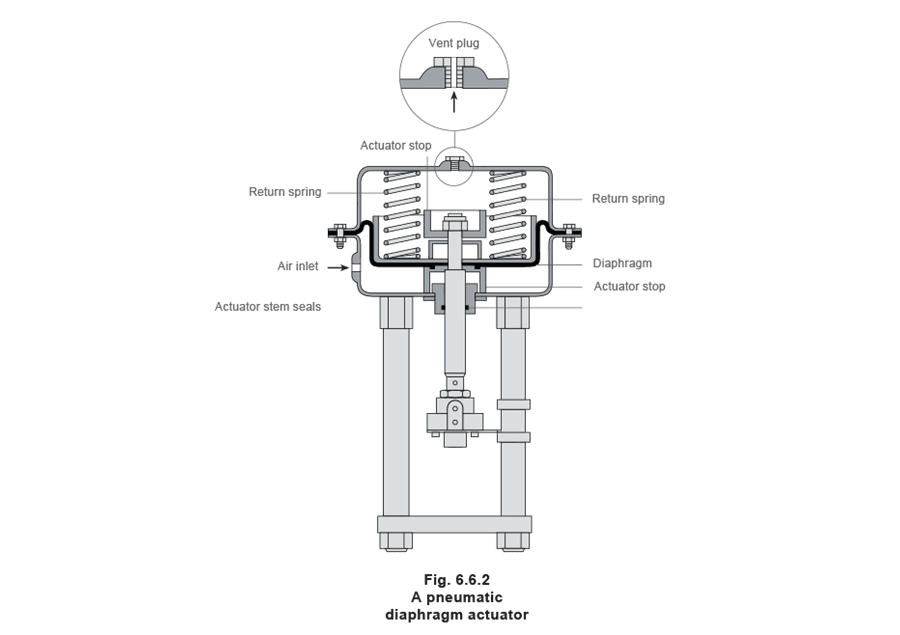
Мембранные приводы
В мембранных приводах сжатый воздух подаётся на гибкую мембрану, называемую diaphragm. Figure 6.6.2 показывает rolling diaphragm, у которой эффективная площадь мембраны практически постоянна по всему ходу привода. Такие приводы являются single acting, то есть воздух подаётся только с одной стороны мембраны, и могут быть direct acting (spring-to-retract) или reverse acting (spring-to-extend).
Reverse acting (spring-to-extend) Рабочее усилие создаётся давлением сжатого воздуха, приложенного к гибкой мембране. Привод спроектирован так, что сила от давления воздуха, умноженного на площадь мембраны, преодолевает силу пружины(пружин), действующую в противоположном направлении.
Мембрана (Figure 6.6.2) перемещается вверх, подтягивая шток, и если шток соединён с клапаном direct acting, тарелка клапана открывается. Привод рассчитан так, чтобы при определённом изменении давления воздуха шток проходил полный ход клапана от полностью закрытого до полностью открытого положения.
При уменьшении давления воздуха пружина(пружины) перемещают шток в обратном направлении. Диапазон давления воздуха соответствует заявленному диапазону пружины привода, например 0.2 - 1 bar.
Для более крупного клапана и/или при более высоком перепаде давления требуется большее усилие для полного перемещения клапана.
Чтобы создать большее усилие, нужна большая площадь мембраны или более высокий диапазон пружины. Именно поэтому производители систем управления предлагают ряд пневматических приводов под различные клапаны - с увеличивающимися площадями мембран и разными диапазонами пружин для получения различных усилий.
Схемы на Figure 6.6.3 показывают элементы базового пневматического привода и направление перемещения штока при росте давления воздуха.
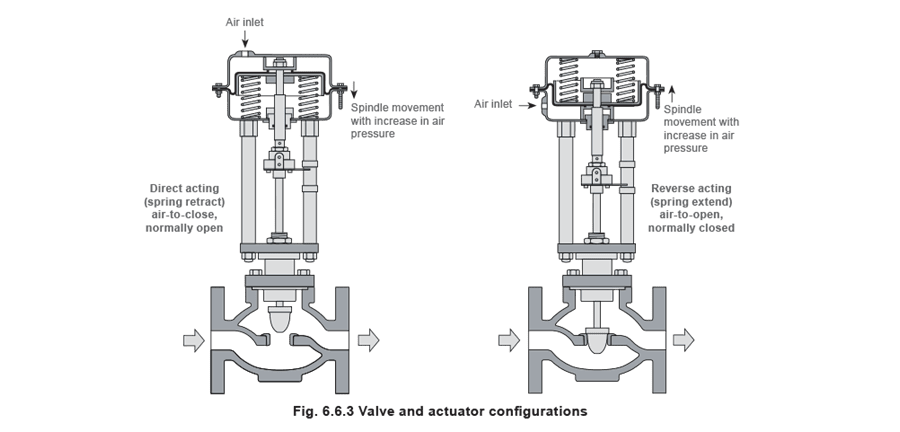
Привод direct acting (spring-to-retract) Привод direct acting выполнен так, что пружина расположена под мембраной, а воздух подаётся в полость над мембраной. В результате при повышении давления воздуха шток движется в противоположном направлении по сравнению с reverse acting actuator.
Как это движение влияет на открытие клапана, зависит от конструкции и типа клапана, что показано на Figure 6.6.3.
Однако существует и альтернативный вариант, показанный на Figure 6.6.4. Пневматический привод direct acting соединён с регулирующим клапаном, имеющим тарелку reverse acting plug (иногда её называют ‘hanging plug’).
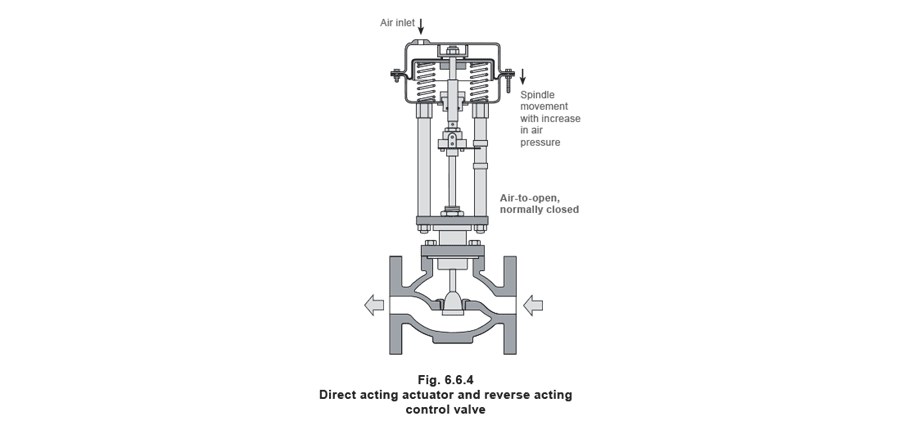
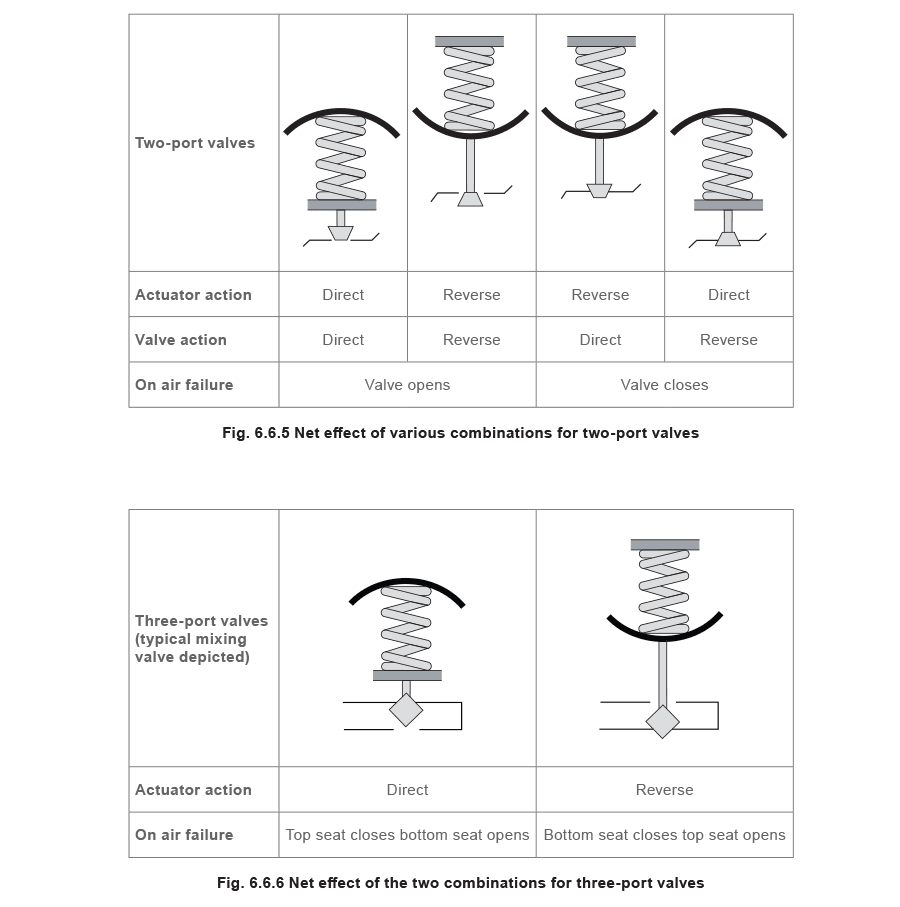
Выбор между direct acting и reverse acting пневматическими системами зависит от того, в какое положение должен перейти клапан при отказе подачи сжатого воздуха. Должен ли клапан закрыться или полностью открыться? Это определяется характером применения и требованиями безопасности. Для паровых клапанов логично закрытие при потере воздуха, а для клапанов охлаждения - открытие при потере воздуха. Всегда нужно рассматривать комбинацию типа привода и типа клапана.
Figure 6.6.5 и Figure 6.6.6 показывают результирующий эффект различных комбинаций.
Влияние перепада давления на ход клапана
Воздух, подаваемый в мембранную камеру, является управляющим сигналом от пневматического контроллера. Наиболее распространённый диапазон сигнального давления воздуха - от 0.2 bar до 1 bar. Рассмотрим reverse acting actuator (spring-to-extend) со стандартной пружиной(пружинами) 0.2 - 1.0 bar, установленный на клапане direct acting (Figure 6.6.7).
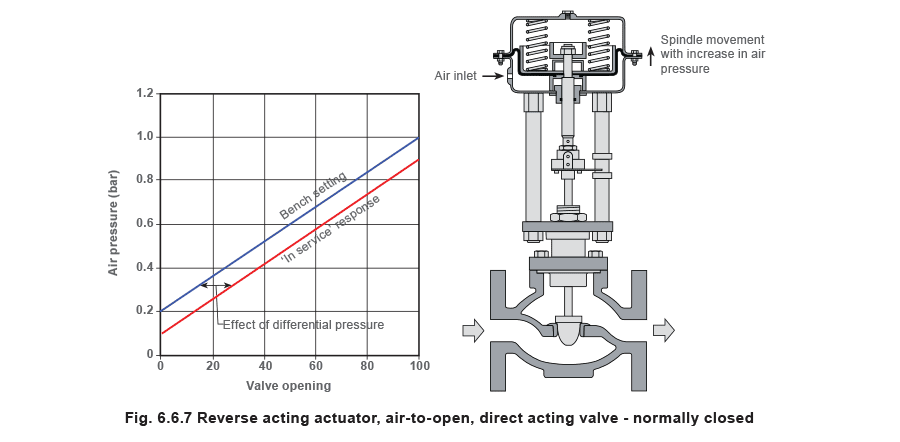
Когда сборка клапан/привод калибруется (или ‘bench set’), её настраивают так, чтобы давление воздуха 0.2 bar лишь начинало преодолевать сопротивление пружин и отрывать тарелку клапана от седла.
По мере увеличения давления воздуха тарелка клапана всё больше удаляется от седла, пока при 1 bar клапан не окажется открыт на 100%. Это графически показано на Figure 6.6.7.
Теперь рассмотрим эту сборку, установленную в трубопровод редукционной системы, где до клапана 10 bar g, а после клапана поддерживается 4 bar g.
Перепад давления на клапане составляет 10 - 4 = 6 bar. Это давление действует на нижнюю сторону тарелки клапана, создавая силу, стремящуюся открыть клапан. Эта сила добавляется к усилию, создаваемому давлением воздуха в приводе.
Следовательно, если на привод подать, например, 0.6 bar (середина диапазона между 0.2 и 1 bar), фактическое открытие будет больше ожидаемых 50%, потому что дополнительно действует сила от перепада давления.
Кроме того, это дополнительное усилие означает, что при 0.2 bar клапан не будет закрыт. Чтобы закрыть клапан в этом примере, управляющий сигнал нужно снизить примерно до 0.1 bar.
Ситуация немного отличается для парового клапана, регулирующего температуру в теплообменнике, так как перепад давления на клапане изменяется между:
- минимумом, когда процесс требует максимального нагрева и регулирующий клапан открыт на 100%;
- максимумом, когда процесс достиг требуемой температуры и регулирующий клапан закрыт.
Давление пара в теплообменнике растёт с увеличением тепловой нагрузки. Это показано в Module 6.5, Example 6.5.3 и Table 6.5.7.
Если давление до регулирующего клапана остаётся постоянным, то по мере роста давления пара в теплообменнике перепад давления на клапане должен уменьшаться.
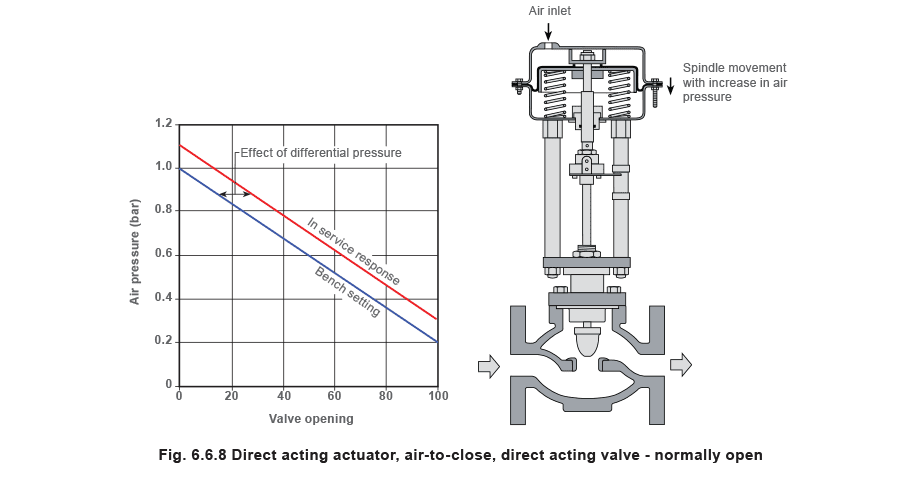
Figure 6.6.8 показывает ситуацию, когда воздух подаётся на привод direct acting. В этом случае сила, действующая на тарелку клапана из-за перепада давления, направлена против силы от давления воздуха. В результате, если на привод подать, например, 0.6 bar, процент открытия окажется больше ожидаемых 50% из-за дополнительной силы от перепада давления. В этом случае управляющий сигнал необходимо увеличить примерно до 1.1 bar, чтобы полностью закрыть клапан.
Иногда возможно откалибровать клапан и привод с учётом усилий, создаваемых перепадом давления, либо использовать другие пружины, другое давление воздуха и другие комбинации привода. Такой подход может быть экономичным решением для небольших клапанов, малых перепадов давления и применений, где не требуется высокая точность. Однако на практике:
- у более крупных клапанов больше площадь, на которую действует перепад давления, а значит, создаются большие усилия и сильнее меняется положение клапана;
- при более высоких перепадах давления возникают большие усилия;
- клапаны и приводы создают трение, вызывая hysteresis. У небольших клапанов относительное влияние трения на суммарные силы обычно выше.
Решением является установка positioner на сборку клапан/привод. (Подробнее о positioners будет сказано далее в этом модуле).
Примечание: для простоты в приведённых выше примерах предполагается, что positioner не используется, а hysteresis равен нулю.
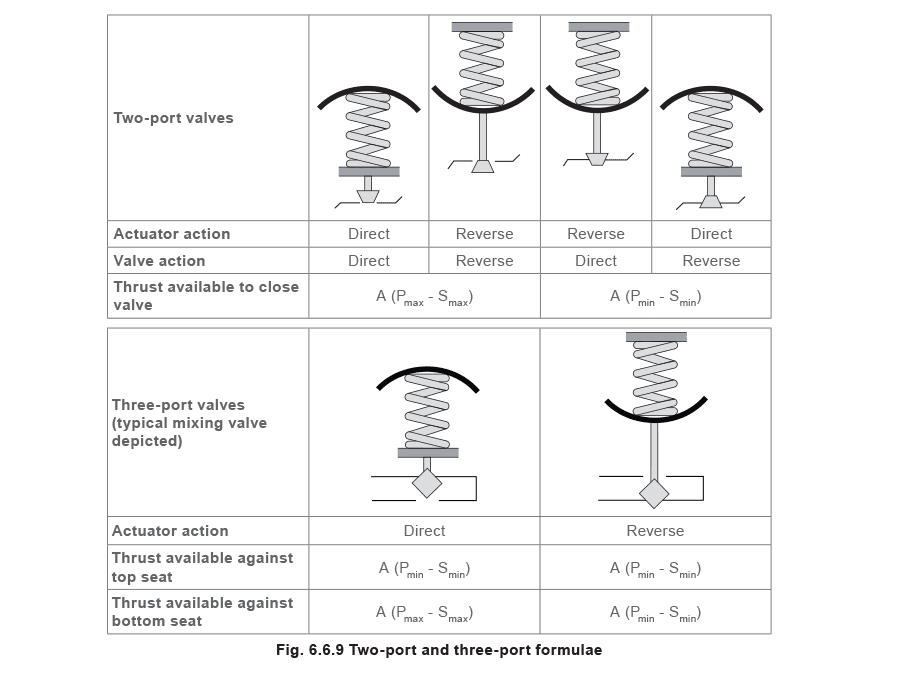
Формулы для определения доступного усилия, удерживающего клапан на седле в различных комбинациях клапана и привода, приведены на Figure 6.6.9.
Где:
A = эффективная площадь мембраны
Pmax = максимальное давление на привод (обычно 1.2 bar)
Smax = максимальная bench setting пружины
Pmin = минимальное давление на привод (обычно 0 bar)
Smin = минимальная bench setting пружины
Доступное для закрытия клапана усилие должно обеспечивать три функции:
- Преодоление перепада давления рабочей среды в закрытом положении.
- Преодоление трения в клапане и приводе, прежде всего в уплотнениях штока клапана и привода.
- Создание прижимного усилия между тарелкой и седлом клапана, обеспечивающего требуемую герметичность.
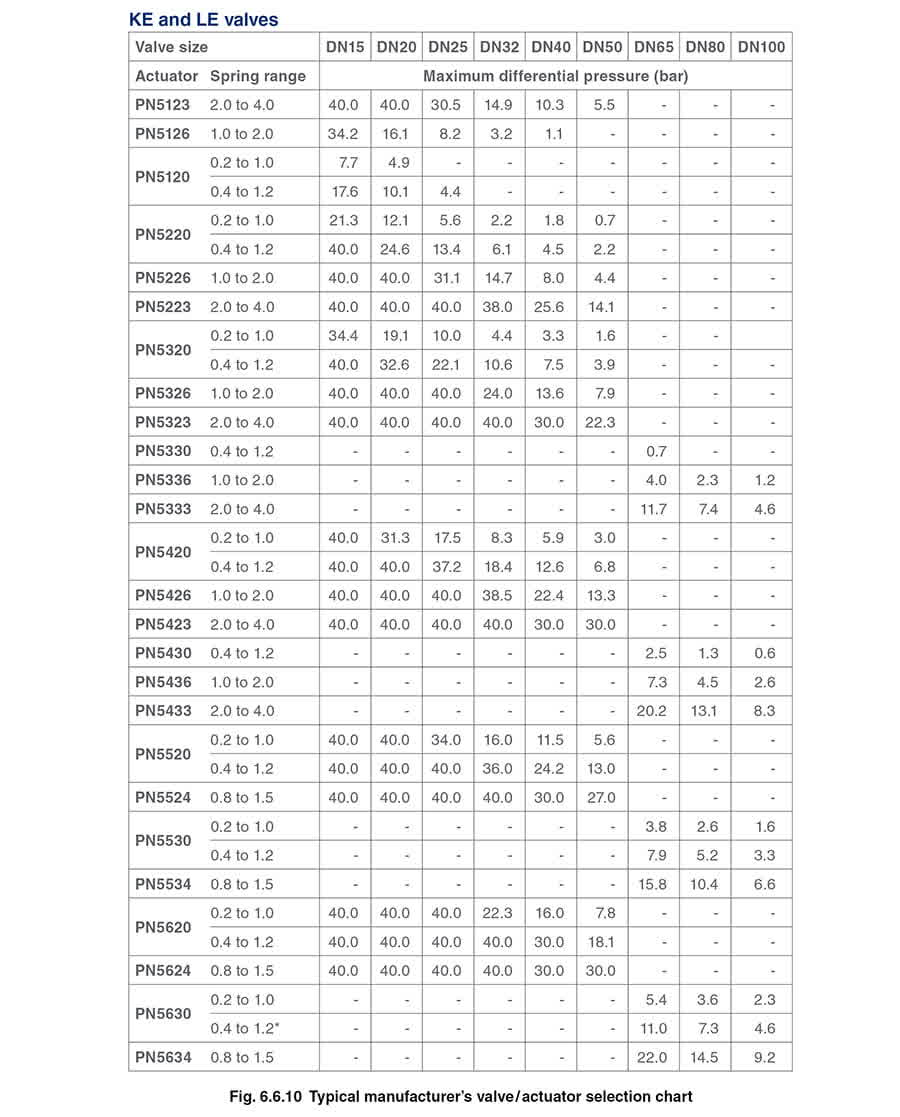
Производители регулирующих клапанов обычно приводят полные данные по максимальным перепадам давления, при которых могут работать различные комбинации клапанов и приводов/пружин; таблица на Figure 6.6.10 является примером таких данных.
Примечание: при использовании positioner необходимо обращаться к документации производителя по минимальному и максимальному давлению воздуха.
Позиционеры Во многих применениях давления 0.2 - 1 bar в мембранной камере может быть недостаточно для преодоления трения и больших перепадов давления. Можно было бы использовать более высокое управляющее давление и более жёсткие пружины, но практическим решением является применение positioner.
Это дополнительный элемент (см. Figure 6.6.11), который обычно крепится к yoke или стойкам привода и соединяется со штоком привода рычагом обратной связи для контроля положения клапана. Для его работы требуется собственная подача воздуха более высокого давления, которую он использует для позиционирования клапана.
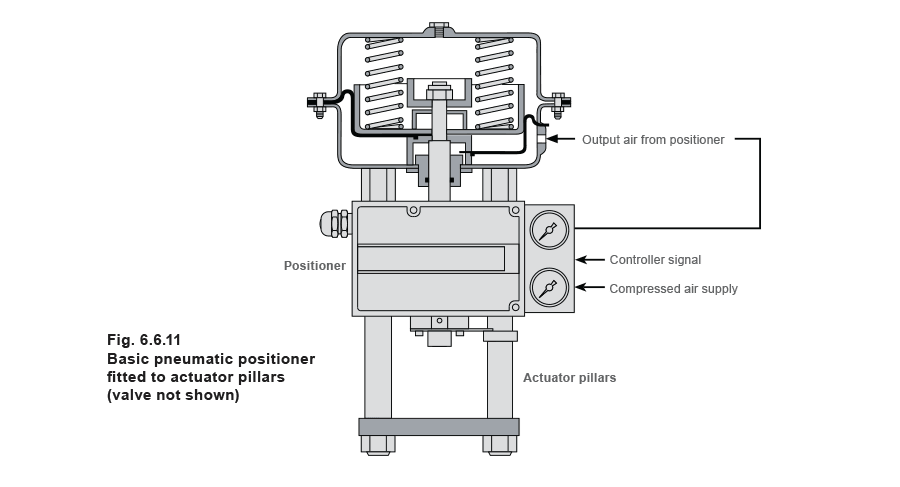
Valve positioner сопоставляет входной сигнал и положение клапана и выдаёт на привод любое требуемое давление, чтобы обеспечить это соответствие в пределах максимально доступного давления питания.
Когда positioner установлен на комбинации клапан/привод типа 'air-to-open', диапазон пружины можно увеличить, чтобы увеличить закрывающее усилие и тем самым повысить максимальный перепад давления, который может выдержать конкретный клапан. Давление воздуха также автоматически корректируется для преодоления трения, тем самым уменьшая влияние hysteresis.
Пример: рассмотрим привод серии PN5400, установленный на клапан DN50 (см. таблицу на Figure 6.6.10).
Электрические приводы Если подача пневмосигнала недоступна или нежелательна, для управления клапаном можно использовать электрический привод. Электрические приводы используют электродвигатель и могут иметь питание 230 Vac, 110 Vac, 24 Vac и 24 Vdc.
Существует два типа электрических приводов: VMD (Valve Motor Drive) и Modulating.
VMD (Valve Motor Drive) Этот базовый вариант электрического привода имеет три состояния:
- Открытие клапана.
- Закрытие клапана.
- Отсутствие движения.
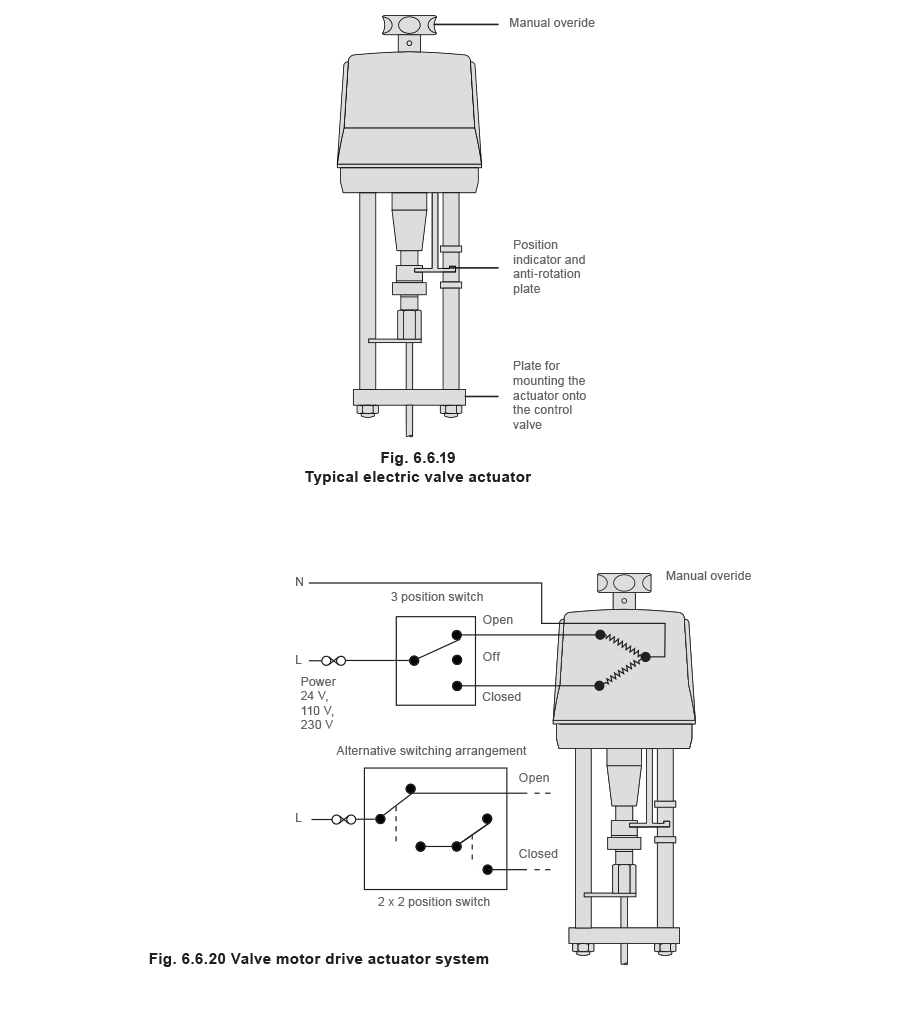
Figure 6.6.20 показывает систему VMD, в которой прямой и обратный ход привода управляются напрямую любыми внешними трёхпозиционными или двумя двухпозиционными переключателями. Эти переключатели рассчитаны на напряжение привода и при необходимости могут быть заменены соответствующими реле.
Внутри VMD-приводов устанавливаются ограничительные устройства для защиты двигателя от повреждения из-за выхода за пределы хода. Эти устройства основаны либо на максимальном моменте двигателя, либо на концевых выключателях положения. В обоих случаях они останавливают привод, разрывая цепь питания двигателя.
- У концевых выключателей положения есть преимущество: их можно настроить для ограничения хода клапана в случае завышенного размера клапана.
- У torque switches есть преимущество: они обеспечивают определённое усилие прижатия к седлу и защищают привод при заклинивании штока клапана.
- Если используются только концевые выключатели положения, их можно сочетать с подпружиненной муфтой для обеспечения плотного закрытия клапана.
Привод VMD может использоваться как для on/off actuation, так и для модулирующего управления. Контроллер позиционирует клапан, подавая команду на открытие или закрытие в течение определённого времени, чтобы достичь нужного положения. В некоторых контроллерах может использоваться обратная связь по положению клапана.
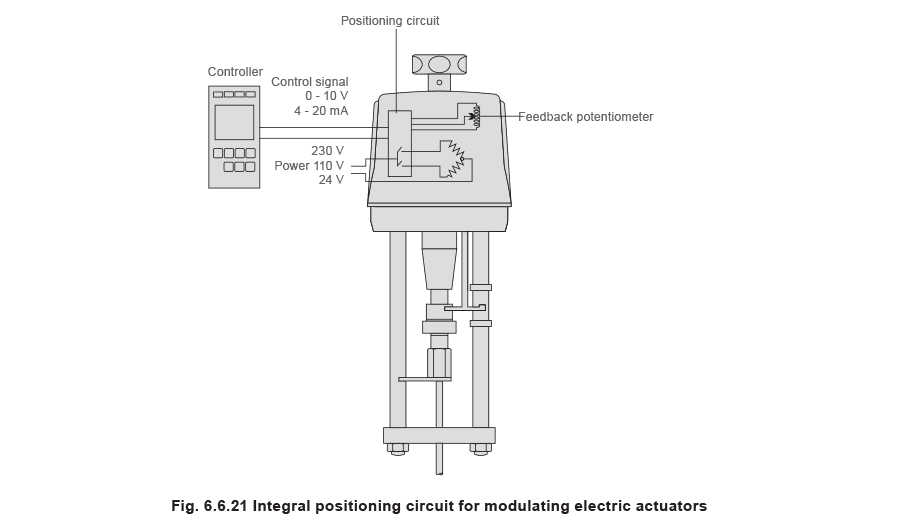
Modulating Для позиционирования регулирующего клапана в соответствии с требованиями системы может применяться modulating actuator. Такие приводы могут иметь двигатели повышенного ресурса (обычно 1 200 starts/hour) и встроенную электронику.
Внутри modulating actuator может быть предусмотрен позиционирующий контур, принимающий аналоговый управляющий сигнал (обычно 0-10 V или 4-20 mA). Затем привод интерпретирует этот сигнал как требуемое положение клапана между концевыми выключателями.
Для этого привод оснащён датчиком положения (обычно потенциометром), который передаёт фактическое положение клапана обратно в позиционирующий контур. Благодаря этому привод может быть установлен в любую точку своего хода пропорционально управляющему сигналу. Схема modulating actuator показана на Figure 6.6.21.
Пневматические приводы по своей природе обладают fail-safe функцией: при отказе подачи воздуха или управляющего сигнала клапан закроется. Чтобы обеспечить аналогичную функцию в электрических приводах, доступны версии 'spring reserve', которые откроют или закроют клапан при отказе питания или управляющего сигнала. В качестве альтернативы fail-safe может быть обеспечен аккумуляторным питанием.
Электрические приводы развивают заданные усилия, которые у версий spring reserve могут быть ограничены. При выборе всегда следует обращаться к диаграммам производителя.
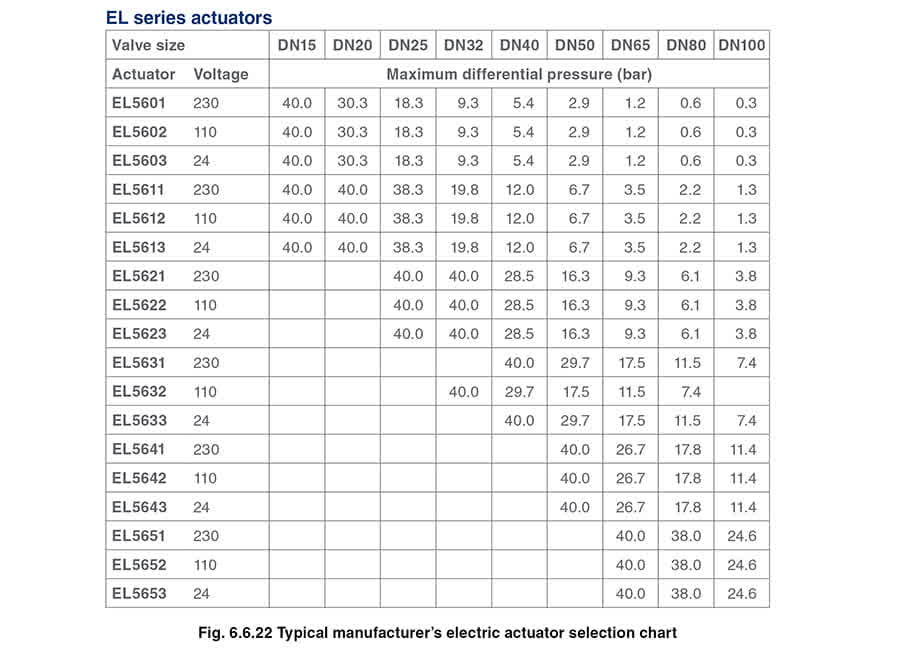
При подборе привода рекомендуется использовать технические данные производителя по максимально допустимому перепаду давления на клапане (см. Figure 6.6.22).
Ещё одним ограничением электрического привода является скорость перемещения клапана, которая может составлять всего 4 seconds/mm; в быстро меняющихся системах этого может быть недостаточно.