
Применение систем регулирования уровня
В промышленности используется широкий спектр систем и методов регулирования уровня. Они могут основываться на применении поплавков, зондов или более сложных технологий. В этом материале рассматривается применение зондов для нерегулируемого и регулируемого двухпозиционного управления, а также модулирующего регулирования уровня жидкостей. Также кратко рассматриваются простые задачи регулирования расхода.
Регулирование уровня жидкости, например в технологическом резервуаре, является важной функцией. В качестве примера можно привести бак горячей воды, из которого вода отбирается, например, для мойки, после чего уровень необходимо восстановить к следующему циклу.
Регулирование уровня воды и аварийные сигналы для паровых котлов специально не рассматриваются в данном модуле; по этому вопросу читателю следует обратиться к Block 3 (The Boiler House), где тема раскрыта подробно.
В промышленности применяется множество различных систем регулирования уровня, охватывающих очень широкий круг процессов. Некоторые процессы связаны не с жидкостями, а с другими средами, например сухими порошками и химическим сырьём. Диапазон сред настолько широк, что ни один прибор не может одинаково хорошо подходить для всех применений.
Для обслуживания такого широкого круга задач существует множество систем. Следующий перечень не является исчерпывающим, но в большинстве случаев конечный управляющий сигнал используется для управления насосами или клапанами, соответствующими конкретной задаче:
Поплавковые системы - поплавок поднимается и опускается при изменении уровня жидкости и срабатывает на заранее заданных точках диапазона.
Системы с жёсткими зондами - измеряют проводимость или ёмкость; подробнее они рассматриваются на следующих страницах.
Ёмкостные системы со стальным тросом - гибкий стальной трос подвешивается в жидкости, а изменение ёмкости измеряется относительно изменения уровня воды.
Ультразвуковые системы - высокочастотный акустический импульс направляется от преобразователя к поверхности измеряемой среды; зная температуру и скорость звука в воздухе, по времени возврата импульса к датчику определяется уровень.
Микроволновые радарные системы - работают по принципу, аналогичному ультразвуковым, но используют высокочастотную электромагнитную энергию вместо акустической.
Гидростатические системы - датчик давления измеряет разницу между гидростатическим давлением столба жидкости над датчиком и атмосферным давлением снаружи. Изменение давления преобразуется в выходной сигнал 4-20 mA, пропорциональный разности напоров.
Системы на дифференциальном давлении - похожи на гидростатические, но применяются там, где измеряемая среда находится под воздействием динамического давления помимо статического. Они способны измерять малые изменения давления в пределах диапазона выходного сигнала. Типичные применения: измерение уровня воды в паровом барабане котла или уровня конденсата в конденсатном кармане ребойлера.
Магнитные системы - поплавок или конус поднимается и опускается вдоль зонда из нержавеющей стали, помещённого в измеряемую жидкость. Поплавок может магнитно взаимодействовать с переключателями снаружи резервуара, которые передают информацию контроллеру.
Торсионные системы - движущийся шток поплавка создаёт изменение крутильного момента, измеряемое торсионным преобразователем.
Важно, чтобы система регулирования уровня была правильно подобрана под конкретное применение, поэтому перед выбором следует обращаться за консультацией к производителю.
В рамках данного модуля не рассматриваются преимущества, недостатки и области применения всех перечисленных типов управления, поскольку в пароконденсатных системах и связанных с ними применениях обычно используются поплавковые системы и системы с жёсткими зондами. Работа поплавковых систем в целом достаточно очевидна, тогда как зонды по проводимости и ёмкости требуют пояснения. Поэтому далее основное внимание будет уделено именно регулированию уровня с использованием зондов проводимости и ёмкостных зондов.
Способы регулирования уровня
Способы регулирования уровня
Существует три основных способа регулирования уровня:
- нерегулируемое двухпозиционное регулирование уровня;
- регулируемое двухпозиционное регулирование уровня;
- модулирующее регулирование уровня.
Нерегулируемое двухпозиционное регулирование уровня (Figure 8.3.1)
Конечным регулирующим органом может быть насос, который включается и выключается, либо клапан, который открывается и закрывается.
Наиболее часто встречаются два основных типа двухпозиционных систем регулирования уровня: поплавковые системы и системы на основе зондов проводимости. Поплавковые регуляторы уровня либо напрямую перемещают регулирующий клапан, либо воздействуют на электрические переключатели посредством поплавка, перемещающегося по поверхности жидкости. Зонды проводимости (см. Figure 8.3.1) могут иметь несколько наконечников; точки управления задаются тем, что отдельные наконечники подрезаются до разной длины.
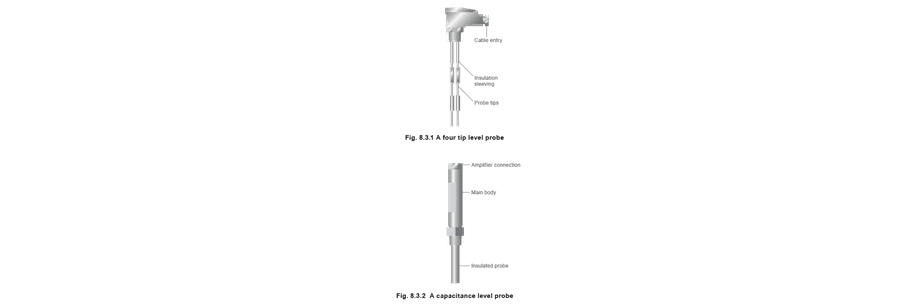
Регулируемое двухпозиционное регулирование уровня (Figure 8.3.2) И здесь конечным регулирующим органом может быть насос с режимом on/off либо клапан с режимом open/closed. Один из способов настройки точек управления основан на использовании ёмкостного зонда (см. Figure 8.3.2). Зонд отслеживает уровень, а точки управления настраиваются через контроллер. Ёмкостные зонды не подрезаются по длине для получения требуемого уровня; при этом, разумеется, общая длина зонда должна быть достаточной для полного диапазона регулирования.
Модулирующее регулирование уровня (Figure 8.3.2) Конечным регулирующим органом может быть клапан, положение которого изменяется между полностью открытым и полностью закрытым в зависимости от контролируемого уровня. Модулирующее регулирование уровня невозможно реализовать с помощью зонда проводимости. Для этой цели идеально подходят ёмкостные зонды (см. Figure 8.3.2).
В системах такого типа насос может работать непрерывно, а клапан пропускает соответствующее количество жидкости. В качестве альтернативы конечным регулирующим органом может быть регулируемый привод насоса. Скорость привода можно изменять в пределах выбранного диапазона.
Сигнализация часто требуется для предупреждения:
- о верхнем аварийном уровне, когда существует опасность переполнения резервуара и разлива горячей жидкости с риском для персонала;
- о нижнем аварийном уровне, когда существует опасность слишком сильного снижения уровня воды в резервуаре, что может привести к повреждению насоса, забирающего воду из резервуара, либо к отсутствию жидкости для процесса.
Установка поплавков и зондов в турбулентных условиях В некоторых баках и сосудах могут возникать турбулентные условия, приводящие к нестабильным и нерепрезентативным сигналам. Если такие условия вероятны или уже существуют, рекомендуется устанавливать поплавки или зонды в защитных трубках. Они оказывают демпфирующее действие на измеряемый уровень воды. Остальная часть модуля посвящена именно зондам, а не поплавкам, для задач регулирования уровня.
Нерегулируемое двухпозиционное регулирование уровня
Нерегулируемое двухпозиционное регулирование уровня
Описание
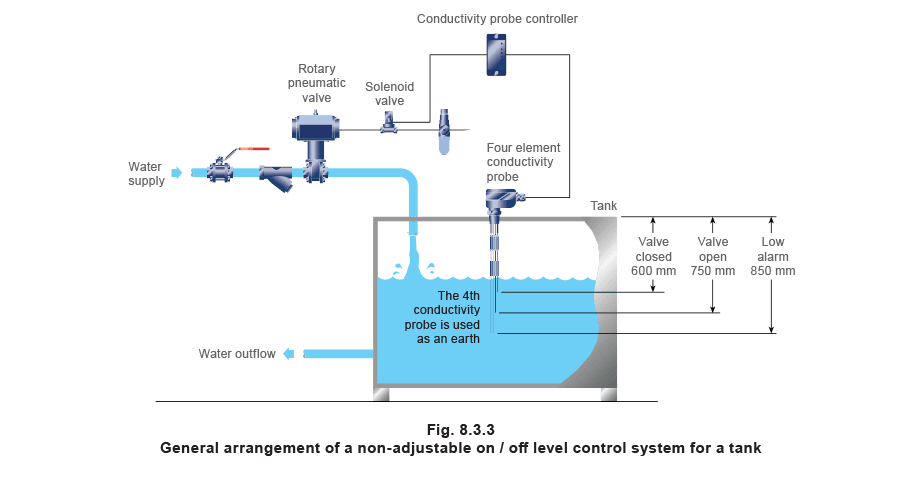
Нерегулируемое двухпозиционное регулирование уровня использует зонд проводимости, подключённый к электронному контроллеру. Зонд обычно имеет три или четыре наконечника, каждый из которых подрезается при монтаже для получения требуемого уровня переключения или аварийной сигнализации (см. Figure 8.3.3).
- Когда наконечник зонда погружён в жидкость, он использует относительно высокую проводимость воды для замыкания электрической цепи через металлические стенки резервуара и контроллер.
- Когда уровень воды опускается ниже наконечника, сопротивление цепи резко возрастает, указывая контроллеру, что наконечник больше не погружён в жидкость.
- В случае простой системы заполнения с двухпозиционным регулированием уровня:
- клапан открывается, когда уровень воды в резервуаре опускается ниже конца одного наконечника;
- клапан закрывается, когда уровень воды поднимается и достигает другого наконечника;
- другие наконечники могут использоваться для включения сигналов нижнего или верхнего аварийного уровня.
Преимущество: Простой, но точный и относительно недорогой метод регулирования уровня.
Применение: Система может использоваться для жидкостей с проводимостью 1 μS/cm и выше и подходит для конденсатных баков, баков питательной воды, а также технологических ванн и сосудов. Если проводимость ниже этого уровня, рекомендуется использовать ёмкостные регуляторы уровня.
Важно отметить:
Если резервуар изготовлен из непроводящего материала, электрическая цепь может замыкаться через другой наконечник зонда.
Регулируемое двухпозиционное регулирование уровня
Регулируемое двухпозиционное регулирование уровня
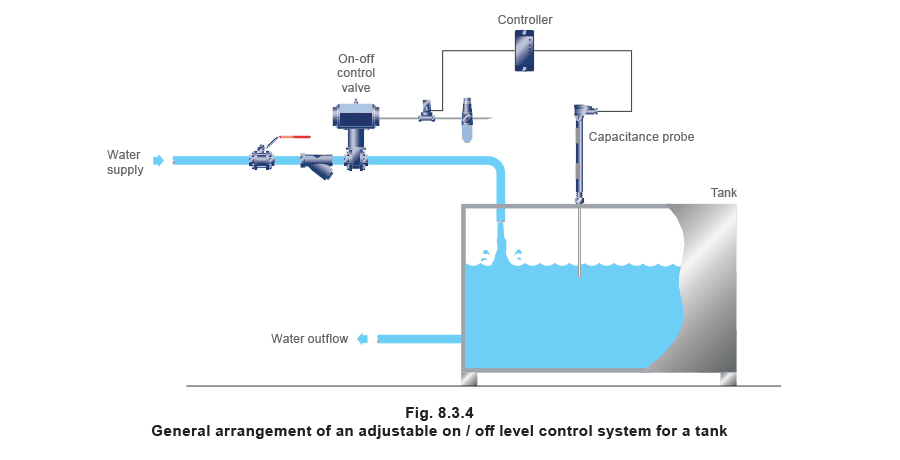
Описание Система регулируемого двухпозиционного регулирования уровня состоит из контроллера и ёмкостного зонда (см. Figure 8.3.4) и обеспечивает:
- управление open/closed клапаном плюс одну точку сигнализации;
- либо две сигнализации: верхнюю и нижнюю.
Уровни, при которых срабатывает клапан, можно настраивать через функции контроллера.
Преимущество: Регулируемое двухпозиционное управление позволяет изменять уставки уровня без остановки процесса.
Недостаток: Дороже нерегулируемого двухпозиционного регулирования.
Применение: Может использоваться для большинства жидкостей, включая среды с низкой проводимостью.
Важно отметить:
Может применяться в ситуациях, когда поверхность жидкости турбулентна; встроенную электронику можно настроить так, чтобы предотвратить частые циклы включения/выключения насоса (или клапана).
Модулирующее регулирование уровня
Модулирующее регулирование уровня
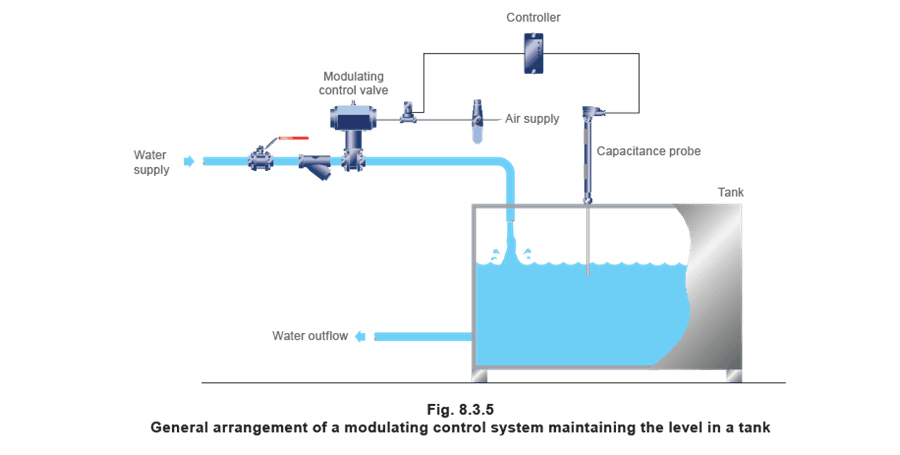
Описание Система модулирующего регулирования уровня состоит из ёмкостного зонда и соответствующего контроллера, формирующего модулирующий выходной сигнал, обычно 4-20 mA. См. Figure 8.3.5. Этот сигнал можно использовать для воздействия на различные устройства, в том числе:
- для модуляции регулирующего клапана;
- для управления приводом насоса с регулируемой скоростью.
Преимущество:
- Поскольку зонд и контроллер лишь формируют сигнал, на который реагируют другие устройства, а не питают исполнительное устройство напрямую, ограничений по масштабу применения практически нет.
- Обеспечивается устойчивое поддержание уровня в резервуаре.
Недостатки:
- Дороже системы на основе зонда проводимости.
- Сложнее системы на основе зонда проводимости.
- Система подачи должна быть постоянно готова к работе.
- Менее подходит для резервного режима работы.
- Возможен больший расход электроэнергии.
Важно отметить:
Чтобы защитить подающий насос от перегрева при работе на закрытый модулирующий клапан, предусматривают рециркуляционную или переливную линию, обеспечивающую минимальный расход через насос (на Figure 8.3.5 не показана).
Применение регулирования расхода пара
Применение регулирования расхода пара
Регулирование расхода пара встречается реже, чем регулирование давления и температуры, но используется в тех случаях, когда контроль давления или температуры невозможен либо не подходит для достижения технологических целей. В следующих разделах приводится дополнительная информация об измерении и регулировании расхода пара.
Система регулирования расхода
Система регулирования расхода
Типовые применения:
- Системы feed-forward на котельных установках, где расход пара от котла влияет на другие точки регулирования, например на расход подпиточной воды и интенсивность горения.
- Процессы регидратации, в которых в продукт, высушенный для транспортировки или хранения, вводится строго измеренное количество пара (воды). Такие применения встречаются, например, в табачной, кофейной и комбикормовой промышленности.
- Периодические процессы, в которых из опыта известно, что определённое количество пара обеспечит нужный результат для продукта.
Выбор и применение компонентов для регулирования расхода требуют тщательной проработки.
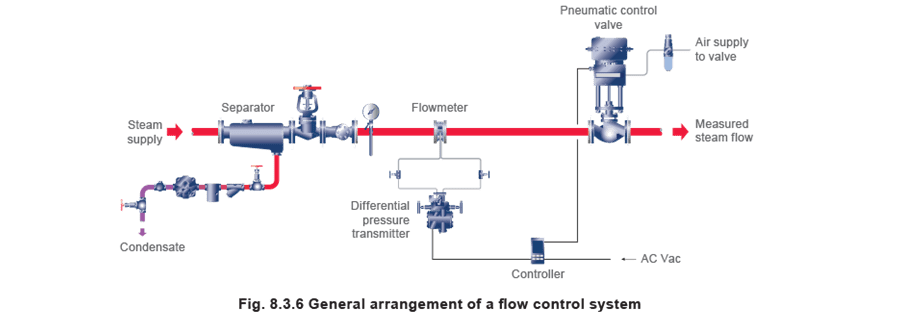
Расходомер (трубопроводный преобразователь) Расходомер является трубопроводным преобразователем, который преобразует расход в измеряемый сигнал. Наиболее распространённый трубопроводный преобразователь обычно связывает расход с перепадом давления. Этот сигнал давления поступает на другой преобразователь (как правило, стандартный DP-transmitter), который преобразует перепад давления в электрический сигнал. Некоторые трубопроводные преобразователи способны преобразовывать расход непосредственно в электрический сигнал без использования DP-transmitter.
Figure 8.3.6 показывает расходомер переменного сечения и стандартный DP-transmitter, преобразующие измеренный на расходомере перепад давления в электрический сигнал 4 - 20 mA. Стандартный DP-transmitter калибруется на определённое давление перед расходомером; если это давление изменяется, выходной сигнал перестаёт точно отражать расход. Один из способов устранить проблему - подавать сигнал давления (или температуры), если средой является насыщенный пар, либо сигнал давления и температуры, если средой является перегретый пар, как объясняется в следующем разделе. Другой способ - использовать mass flow DP transmitter, который автоматически компенсирует изменения давления.
Возможная необходимость компьютера
Возможная необходимость компьютера
Если по трубопроводу проходит пар, могут понадобиться дополнительные датчики температуры и/или давления для формирования сигналов компенсации изменений давления в подающей линии, как показано на Figure 8.3.7.
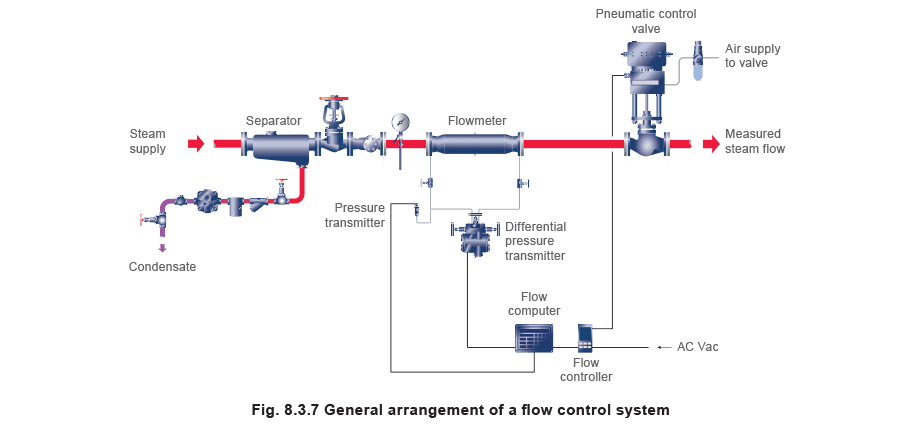
Наличие нескольких входов означает, что для точного измерения насыщенного или перегретого пара потребуется дополнительный flow computer (или PLC), содержащий электронные паровые таблицы и обрабатывающий сигналы от всех этих датчиков расхода, давления и температуры.
Если flow computer для компенсации изменений давления до расходомера недоступен, иногда можно обеспечить постоянное давление, например с помощью расположенного перед ним регулирующего клапана, чтобы получить стабильное и точное управление давлением (на Figure 8.3.7 не показано).
Назначение этого клапана регулирования давления состоит в обеспечении стабильного, а не пониженного давления, однако он неизбежно создаёт перепад давления в подающем трубопроводе.
Сепаратор, установленный перед любым узлом измерения расхода пара для защиты расходомера от влажного пара, также защитит клапан регулирования давления от эрозионного износа типа wiredrawing.
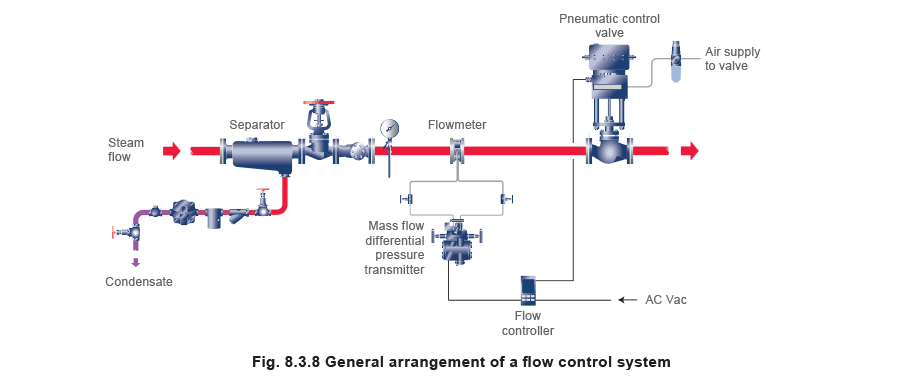
Использование mass flow DP transmitter При использовании mass flow DP transmitter вместо стандартного DP transmitter компьютер для обеспечения точного измерения уже не требуется, как показано на Figure 8.3.8.
Это связано с тем, что mass flow transmitter имеет собственный набор паровых таблиц и способен компенсировать любые изменения давления подачи насыщенного пара.
Тем не менее компьютер всё же может использоваться, если требуется дополнительная информация по измерению расхода, например время максимальной или минимальной нагрузки, либо если необходимо интегрировать расход за определённый период времени.
Контроллер по-прежнему необходим, если расход требуется именно регулировать, независимо от применяемой схемы.
Контроллер Даже если выходной сигнал от DP transmitter или компьютера имеет вид, который может быть принят приводом регулирующего клапана, контроллер всё равно потребуется, как и в любой другой системе управления, по следующим причинам:
- Выходной сигнал некоторых расходомеров/компьютеров имеет большой интервал обновления (примерно 3 seconds), что вполне достаточно для самописца, но может оказаться недостаточным для регулирования клапаном. Это означает, что если контроллер или PLC, на который подаётся сигнал передатчика, работает на более высокой скорости, процесс может стать неустойчивым.
- Без контроллера функции PID недоступны.
- Без контроллера невозможно задать уставку.
- Сигнал необходимо откалибровать относительно хода клапана; при отсутствии такой калибровки легко возникают проблемы как при сильно завышенном, так и при заниженном размере клапана.
Итоги
Итоги
Обычно лучше устанавливать устройство измерения расхода перед клапаном регулирования расхода. Более высокое давление уменьшает его размер и делает решение экономичнее. Кроме того, расходомер, скорее всего, будет работать при более постоянном давлении (и плотности) пара и будет меньше подвержен влиянию турбулентности от расположенного после него клапана регулирования расхода.
В некоторых случаях требуется поддерживать постоянный расход. Тогда такие характеристики, как высокий коэффициент turndown, не столь важны, и расходомеры на диафрагме могут оказаться вполне подходящими.
Если же расход должен изменяться в широких пределах, параметр turndown становится фактором, который необходимо учитывать.
Тема измерения расхода более подробно рассматривается в Block 4.