
Практические рекомендации по монтажу и пусконаладке клапанов, приводов, датчиков, контроллеров и другого оборудования.
Клапаны
Клапаны
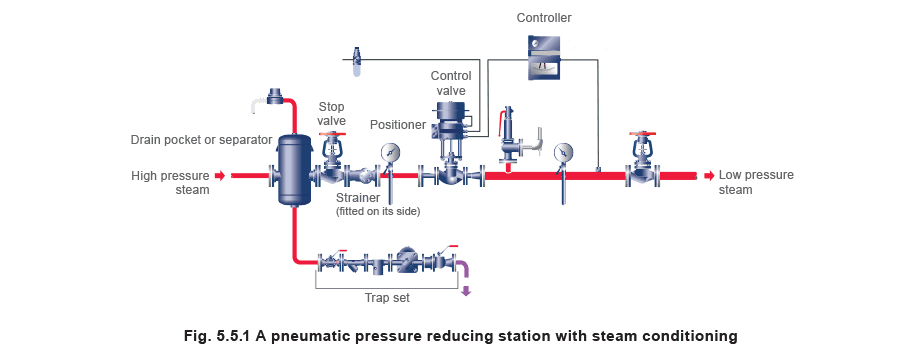
Перед монтажом регулирующего клапана необходимо убедиться, что его размер, класс давления, материалы и типы присоединений подходят для условий, в которых клапан должен работать. Все авторитетные производители оборудования для автоматического управления предоставляют подробные инструкции по правильному монтажу своей продукции. Также поставляются данные о настройке оборудования и о необходимом регулярном техническом обслуживании. Во многих случаях производитель предлагает и выездную услугу пусконаладки на объекте. В ряде случаев может быть заключён договор на регулярное послепродажное обслуживание. В модуле 5.5 рассматриваются основные моменты, которые нужно учесть до монтажа. Трубопроводы до и после регулирующего клапана должны быть чистыми и ничем не перекрытыми. Правильная работа клапана нарушается, если на него воздействуют напряжения от деформации трубопровода. Важно убедиться, что все фланцевые соединения собраны ровно и точно, а трубопровод имеет надлежащие опоры. Регулирующие клапаны, как правило, следует устанавливать на горизонтальных трубопроводах со штоком в вертикальном положении. Трубопроводные системы часто подвергаются гидравлическим испытаниям давлением до ввода в эксплуатацию. Такое испытание может проводиться при давлении выше нормальных рабочих условий. Необходимо убедиться, что регулирующий клапан и его внутренние элементы рассчитаны на это более высокое испытательное давление. Регулирующие клапаны по сути являются приборами и будут повреждены, если в них попадут грязь или другие абразивные либо засоряющие материалы. Поэтому в большинстве применений необходимо защищать их, устанавливая трубопроводные фильтры перед каждым регулирующим клапаном. Клапаны также должны быть доступны для регламентного обслуживания, например для перенабивки сальников и замены внутренних элементов. Чтобы облегчить такие работы, установка полнопроходных запорных клапанов по обе стороны регулирующего клапана позволяет минимизировать простой установки во время выполнения работ. Если установка должна оставаться в работе постоянно, даже во время осмотра или технического обслуживания регулирующего клапана, может потребоваться байпас с клапаном. Однако клапан, используемый в байпасе, должен быть качественным и должен представлять собой либо дросселирующий клапан с характеристикой, либо другой регулирующий клапан с правильным Kvs. Любая утечка через него в нормальном режиме повлияет на работу системы управления. Установка ручных байпасов не рекомендуется ни при каких обстоятельствах. Регулирующий клапан должен быть установлен так, чтобы обеспечивалось правильное направление потока рабочей среды через него. Обычно стрелка «direction of flow» отливается на корпусе регулирующего клапана. Клапан должен иметь достаточную пропускную способность и создавать допустимое падение давления. В паропроводах важно предусмотреть паровой сепаратор и / или точку отвода конденсата перед клапаном, как показано на рисунке 5.5.1. Это предотвращает перенос конденсата через регулирующий клапан, что в противном случае сократило бы срок его службы. Эта точка дренажа также важна, если клапан может оставаться закрытым в течение длительного времени. Если отвод конденсата не предусмотрен, при открытии клапана возможны гидроудар и потенциально серьёзные повреждения. Установка парового сепаратора и фильтра обеспечивает хорошую подготовку пара.
Приводы / датчики
Приводы / датчики
Здесь также необходимо следовать инструкциям производителя. Обычно приводы устанавливаются вертикально над регулирующим клапаном, хотя при монтаже электрического привода на клапан, работающий с высокотемпературной средой, например паром, могут рекомендоваться иные варианты. В целом приводы следует располагать вдали от таких условий, как избыточный нагрев, высокая влажность или коррозионные пары. Эти факторы могут вызвать преждевременный выход из строя компонентов, например мембран или электрических / электронных узлов. Производители должны указывать рекомендуемую максимальную температуру окружающей среды для своего оборудования. Для некоторых электроприводов, если вероятно образование конденсата внутри привода, доступны модели со встроенным подогревателем. Если подобных условий избежать нельзя, следует выбирать приводы, рассчитанные на данные условия эксплуатации. Корпуса приводов, позиционеров и подобного оборудования обычно имеют класс защиты оболочки, соответствующий национальным электротехническим нормам. Он должен определять степень защиты корпуса от проникновения пыли и воды. Нет смысла использовать электрический привод с низким классом защиты от воды, если предполагается его промывка из шланга. Необходимо следить за тем, чтобы датчики были полностью и правильно погружены, если они должны эффективно выполнять свою измерительную функцию. Использование гильз позволяет проводить осмотр или замену без необходимости сливать трубопроводную систему, ёмкость или технологическую установку. С другой стороны, гильзы увеличивают время отклика. Использование теплопроводной пасты в гильзе позволяет минимизировать задержку отклика.
Линии питания и сигнальные линии
Линии питания и сигнальные линии
В пневматической системе линии сжатого воздуха и пневмосигнала должны быть сухими, без масла и грязи и полностью герметичными. Размещение пневматического контроллера рядом с клапаном и приводом позволит минимизировать задержки, вызванные ёмкостью и сопротивлением сигнальной линии. Обычно клапан, привод и любые позиционеры или преобразователи поставляются как полностью собранный узел. Если это не так, привод необходимо смонтировать на клапан, а позиционер (для пневматической системы) — на привод. Затем этот узел нужно правильно настроить, чтобы обеспечить правильный ход клапана и т. д., в полном соответствии с инструкциями производителя.
Электропроводка для электрических / электронных и электропневматических систем управления
Слишком часто многие кажущиеся проблемы «управления» в итоге оказываются следствием неправильной проводки. В качестве очевидного крайнего примера: подключение питания 110 V к двигателю, рассчитанному на 24 V, приведёт к повреждению. К проводке нужно относиться очень внимательно, следуя инструкциям производителя и соблюдая местные нормы. «Шум» или электрические помехи в электрических системах встречаются часто и вызывают проблемы в работе, которые трудно диагностировать. Может потребоваться экранированный кабель, отдельно заземлённый металлический короб либо использование самодействующего или аналогового контроллера. Кабели следует защищать от механических повреждений.
Контроллеры
Контроллеры
Как уже отмечалось, динамика применения обычно оказывается медленнее времени отклика системы управления. Именно поэтому параметры контроллера — пропорциональная зона или коэффициент усиления, интегральное время и время дифференцирования — должны быть настроены под каждое конкретное применение / задачу. Существует несколько методов настройки параметров контроллера, большинство из которых основано на математике. Поведение контура управления можно предсказать математически, однако характеристики процесса или применения обычно определяются эмпирическими измерениями, что может быть затруднительно. Существуют методы, основанные на расчётных теплотехнических соотношениях, но они выходят за рамки данного модуля. Перед настройкой параметров управления полезно ещё раз рассмотреть каждый из терминов управления (P, I и D), а также три варианта их настроек: например слишком широкая, слишком узкая и правильная.
P-band (рисунок 5.5.2)
P-band (рисунок 5.5.2)
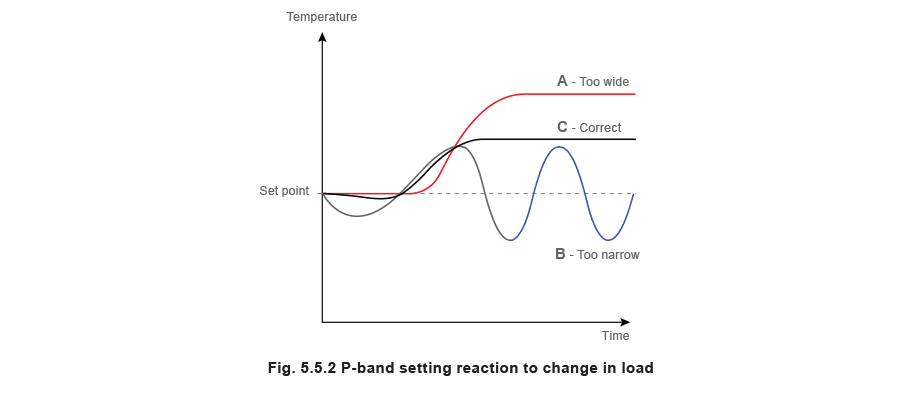
Если P-band слишком широкая, возникает большое смещение, но система очень устойчива (кривая A). Сужение P-band уменьшает смещение. Слишком узкая P-band вызывает неустойчивость и колебания (кривая B). Оптимальная P-band, кривая C, достигается при настройке чуть шире той, которая вызывает постоянные колебания.
Сводка по P-band (пропорциональное действие)
Правильная P-band = Хорошая устойчивость, хороший отклик Некоторое смещение
Более широкая P-band = Лучшая устойчивость, более медленный отклик Большее смещение
Более узкая P-band = Неустойчивость, более быстрый отклик Меньшее смещение, но с колебаниями
Интегральное действие (рисунок 5.5.3)
Интегральное действие (рисунок 5.5.3)
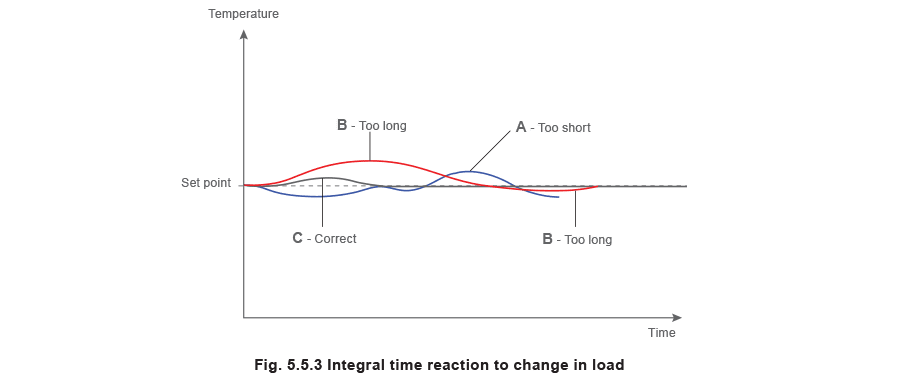
При слишком коротком интегральном времени температура (кривая A) пересечёт заданное значение, и появятся колебания. Чрезмерно большое интегральное время приведёт к тому, что температура будет слишком долго возвращаться к заданному значению (кривая B). Кривая C показывает правильную настройку интегрального времени, при которой температура возвращается к заданному значению максимально быстро без перерегулирования и колебаний.
| Сводка по интегральному действию | ||
| Правильное IAT = | Устранение смещения | Устойчивость — без перерегулирования |
| Слишком короткое IAT = | Устранение смещения | Слишком быстрый отклик, приводящий к неустойчивости и перерегулированию |
| Слишком длинное IAT = | Устранение смещения | Медленный отклик, устойчиво, без перерегулирования |
Дифференциальное действие (рисунок 5.5.4)
Дифференциальное действие (рисунок 5.5.4)
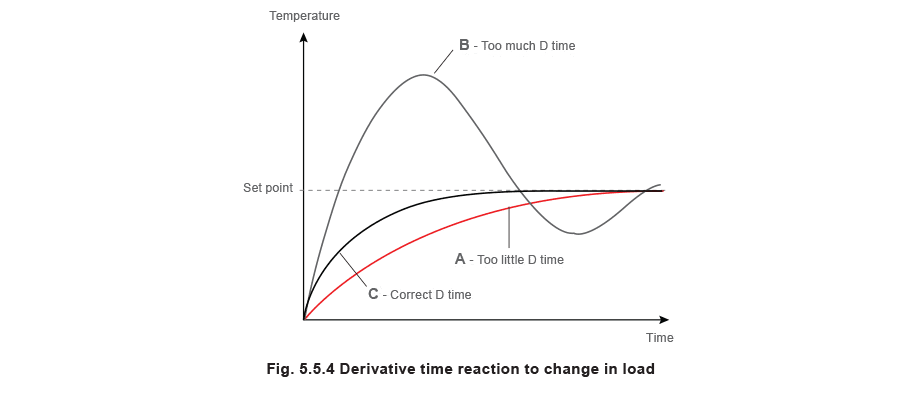
Чрезмерное время дифференцирования вызывает слишком быстрый рост температуры, перерегулирование и колебания (кривая B). Слишком короткое время дифференцирования позволяет температуре слишком долго отклоняться от заданного значения (кривая A). Оптимальная настройка возвращает температуру к заданному значению как можно быстрее и при этом сохраняет хорошую устойчивость (кривая C).
| Сводка по дифференциальному действию | |
| Правильное время дифференцирования = | Быстрый отклик, устойчиво |
| Слишком большое D time = | Более быстрый отклик, приводящий к перерегулированию и неустойчивости |
| Слишком малое D time = | Более медленный отклик |
Практические методы настройки контроллера
Практические методы настройки контроллера
Каждый контроллер должен настраиваться индивидуально под характеристики конкретной системы. Хотя существует ряд различных методик, позволяющих добиться устойчивого и быстрого управления, метод Ziegler-Nicholls зарекомендовал себя как очень эффективный.
Метод Ziegler-Nicholls
Метод Ziegler-Nicholls
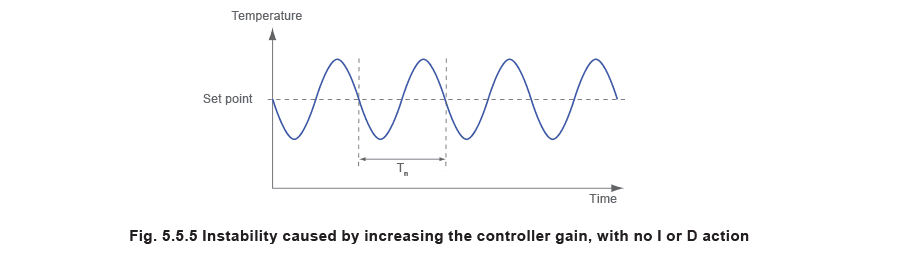
Метод частотного отклика Ziegler-Nicholls (иногда называемый методом критических колебаний) очень эффективен для определения настроек контроллера под реальную нагрузку. В этом методе контроллер используется как усилитель до достижения точки неустойчивости. В этой точке вся система работает так, что температура колеблется вокруг set point с постоянной амплитудой (см. рисунок 5.5.5). Небольшое увеличение усиления или уменьшение пропорциональной зоны сделает систему неустойчивой, и регулирующий клапан начнёт «охотиться» с возрастающей амплитудой. Напротив, увеличение пропорциональной зоны сделает процесс более устойчивым, и амплитуда колебаний будет постепенно уменьшаться. В точке неустойчивости получается характеристика системы для реальных условий работы, включая теплообменник, регулирующий клапан, привод, трубопроводы и температурный датчик. Настройки контроллера по методу Ziegler-Nicholls можно определить, измерив период температурных колебаний (Tn) и фактическую настройку P-band в точке неустойчивости.
Процедура выбора настроек PID-параметров по методу Ziegler-Nicholls следующая:
- Исключите интегральное действие контроллера, увеличив интегральное время (Ti) до максимума.
- Исключите дифференциальное действие контроллера, установив время дифференцирования (TD) в 0.
- Дождитесь, пока процесс достигнет устойчивого состояния.
- Уменьшайте пропорциональную зону (увеличивайте усиление), пока не будет достигнута точка неустойчивости.
- Измерьте время одного периода (Tn) и зафиксируйте фактическую настройку P-band (пропорциональной зоны) контроллера в этой точке.
- Используя эту настройку как исходную, рассчитайте соответствующие параметры контроллера по значениям на рисунке 5.5.6.
Рисунок 5.5.6 Расчёт Ziegler-Nicholls
Рисунок 5.5.6 Расчёт Ziegler-Nicholls
| Пропорциональная зона | Интегральное время | Время дифференцирования | |
|---|---|---|---|
| P I D-регулирование | P-band x 1.7 | Tn/2 | Tn/8 |
| P I-регулирование | P-band x 2.2 | Tn/1.2 | |
| P-регулирование | P-band x 2.0 |
Настройки контроллера можно дополнительно корректировать для повышения устойчивости или улучшения быстродействия. Влияние изменения PID-параметров на устойчивость и отклик системы показано на рисунке 5.5.7.
Рис. 5.5.7 Влияние изменения PID-настроек
Рис. 5.5.7 Влияние изменения PID-настроек
| Устойчивость | Отклик | |
| Увеличить P-band | Увеличивается | Замедляется |
| Увеличить Ti | Увеличивается | Замедляется |
| Увеличить TD | Уменьшается | Ускоряется |
Безударное переключение (Bumpless transfer)
Безударное переключение (Bumpless transfer)
В технических спецификациях контроллеров встречается много других терминов, и один из часто встречающихся — 'bumpless transfer'. Большинство контроллеров имеют переключатель 'Manual' – 'Auto', и бывают ситуации, когда некоторые режимы управления требуют ручного режима. Это делает необходимым временное прерывание автоматического контура управления. Без функции безударного переключения переход из Auto в Manual и обратно означал бы потерю уровней управления, если только ручной выход не был бы предварительно согласован с автоматическим. Безударное переключение гарантирует совпадение выходов — как при переходе Manual в Auto, так и Auto в Manual, — и оператору достаточно лишь перевести переключатель в нужное положение.
Самонастраивающиеся контроллеры
Самонастраивающиеся контроллеры
Современные микропроцессоры позволяют разместить в компактном корпусе контроллера функции, которые раньше требовали полноценного компьютера. Одна из таких функций — 'self-tune'. Контроллеры, которым больше не нужен инженер по пусконаладке для ручной настройки P I D-параметров, существуют уже много лет. Самонастраивающийся контроллер на определённое время переключается в режим on/off. В течение этого периода он анализирует результаты отклика и рассчитывает, а затем устанавливает собственные P I D-параметры. Раньше функция self-tune могла работать только во время запуска системы; после того как контроллер выполнял настройку, параметры P I D оставались постоянными независимо от последующих изменений процесса. Современный контроллер теперь может выполнять так называемую адаптивную функцию, которая не только задаёт исходные P I D-параметры, но и контролирует, а при необходимости перенастраивает их в соответствии с изменениями процесса во время нормальной эксплуатации. Такие контроллеры широко доступны и стоят относительно недорого. Их применение становится всё более распространённым даже для сравнительно несложных задач управления.