Объяснение назначения каждого компонента системы управления, включая клапаны, приводы, датчики и контроллеры, а также введение в методы управления и динамику системы, включая простые контуры управления и системы обратной связи.
Что такое контуры управления?
Что такое контуры управления?
В этом модуле рассматриваются полные системы управления, состоящие из клапана, привода, датчика, контроллера и динамики самого процесса. Контуры управления
Разомкнутая система управления
Разомкнутое управление означает, что отсутствует прямая обратная связь от регулируемого состояния; иными словами, от процесса или системы не поступает информация, сообщающая контроллеру о необходимости корректирующего действия. Система отопления, показанная на рисунке 5.3.1, демонстрирует это тем, что использует датчик за пределами отапливаемого помещения. Система, показанная на рисунке 5.3.1, не является примером практической системы отопления; она лишь иллюстрирует принцип разомкнутого управления.
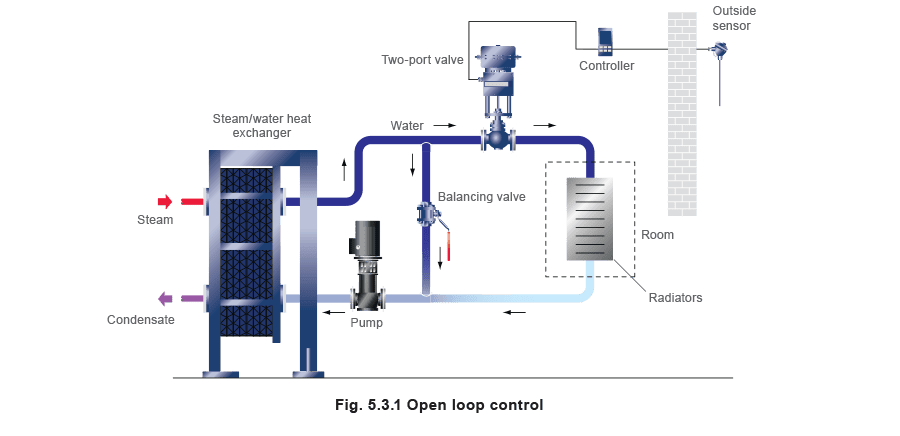
Система состоит из пропорционального контроллера с наружным датчиком, измеряющим температуру окружающего воздуха. Контроллер может быть настроен на достаточно широкую пропорциональную зону, так что при температуре окружающей среды -1°C клапан полностью открыт, а при 19°C — полностью закрыт. Поскольку температура окружающей среды влияет на теплопотери здания, предполагается, что температура в помещении будет регулироваться.
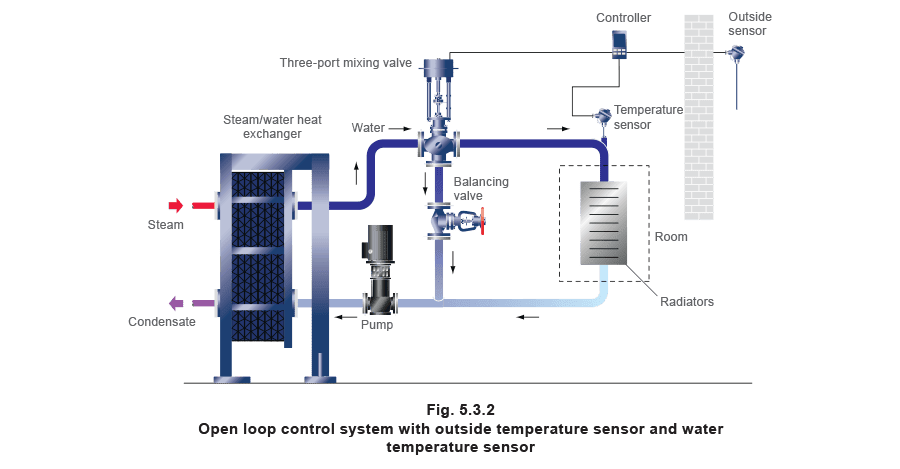
Однако обратной связи о фактической температуре помещения и воздействии других факторов нет. В мягкую погоду, хотя расход воды и регулируется, другие факторы, например высокие солнечные теплопритоки, могут вызвать перегрев помещения. Иными словами, разомкнутое управление обычно обеспечивает лишь грубое регулирование процесса. На рисунке 5.3.2 показана несколько более сложная система управления с двумя датчиками.
Замкнутое управление
Система использует трёхходовой смесительный клапан с приводом, контроллером и наружным датчиком температуры воздуха, а также температурным датчиком в водяной линии.
Наружный температурный датчик подаёт на контроллер удалённое задание, которое используется для коррекции заданной температуры воды. Таким образом, замкнутое управление применяется к температуре воды, протекающей через радиаторы. Когда на улице холодно, вода проходит через радиаторы при максимальной температуре. По мере повышения наружной температуры контроллер автоматически снижает температуру воды, подаваемой в радиаторы. Однако в отношении температуры помещения это всё ещё разомкнутое управление, поскольку отсутствует обратная связь от самого здания или отапливаемого пространства. Если радиаторы избыточны по размеру или были допущены ошибки проектирования, перегрев всё равно будет происходить.
Замкнутое управление
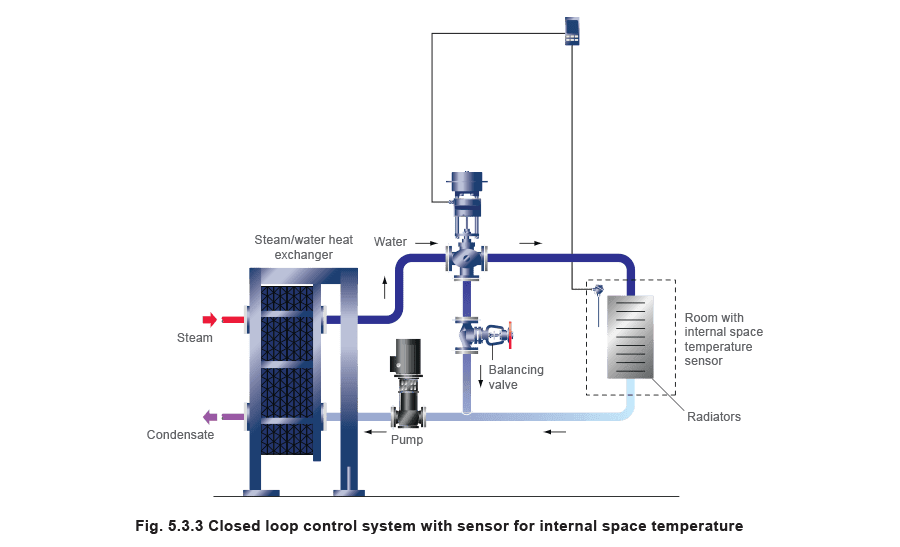
Проще говоря, замкнутой системе управления требуется обратная связь: информация, поступающая непосредственно от процесса или системы. Если использовать простую систему отопления, показанную на рисунке 5.3.3, то добавление внутреннего датчика температуры помещения позволит измерять комнатную температуру и обеспечить замкнутое управление относительно помещения. На рисунке 5.3.3 клапан и привод управляются через датчик температуры в помещении, который обеспечивает обратную связь по фактической комнатной температуре.
Возмущения
Возмущения
Возмущения — это факторы, которые входят в процесс или систему и нарушают значение регулируемой среды. Эти возмущения могут быть вызваны изменениями нагрузки или внешними воздействиями. Например, если в простой системе отопления помещение внезапно заполняется людьми, это является возмущением, поскольку влияет на температуру помещения и на количество тепла, необходимое для поддержания требуемой температуры.
Управление по обратной связи
Управление по обратной связи
Это ещё один тип замкнутого управления. Управление по обратной связи учитывает возмущения и передаёт эту информацию обратно контроллеру, чтобы тот мог выполнить корректирующее действие. Например, если в помещение входит большое количество людей, температура в нём повышается, и тогда система управления уменьшает подачу тепла в помещение.
Управление с опережающим воздействием
Управление с опережающим воздействием
При feed-forward control последствия возмущений прогнозируются и учитываются ещё до того, как событие действительно произойдёт. Примером может быть перевод котла на повышенную мощность перед подключением крупного паропотребляющего технологического оборудования. Последовательность событий может быть такой: включается технологическая установка. Это действие не открывает сразу паровой клапан на процесс, а подаёт команду горелке котла перейти на высокий режим. И только когда высокий режим достигнут, паровому клапану процесса разрешается открыться, причём медленно и контролируемо.
Одноконтурное управление
Одноконтурное управление
Это простейший контур управления, включающий только одну регулируемую переменную, например температуру. Чтобы объяснить это, рассмотрим пароводяной теплообменник, показанный на рисунке 5.3.4.
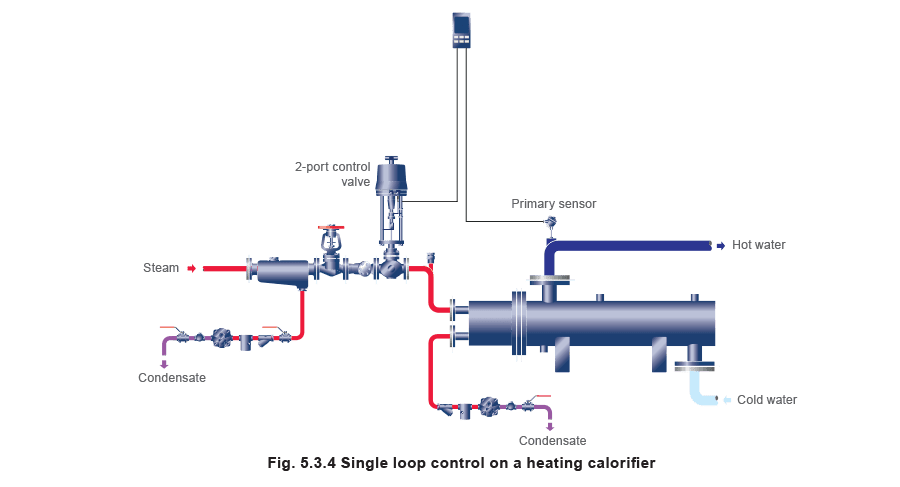
На рисунке 5.3.4 регулируется только одна переменная — температура воды, выходящей из теплообменника. Это достигается регулированием двухходового парового клапана, подающего пар в теплообменник. Первичным датчиком может быть термопара или платиновый термометр сопротивления PT100, измеряющий температуру воды.
Контроллер сравнивает сигнал от датчика с заданным значением на контроллере. Если между ними есть разница, контроллер передаёт сигнал приводу клапана, который перемещает клапан в новое положение. Контроллер также может включать индикатор выхода, показывающий процент открытия клапана. Одноконтурные системы обеспечивают подавляющую часть задач регулирования в отопительных системах и промышленных процессах. Другие термины, используемые для одноконтурных систем:
- управление по заданному значению;
- один замкнутый контур управления;
- управление по обратной связи.
Многоконтурное управление
Многоконтурное управление
В следующем примере рассматривается применение для медленно движущегося продукта на основе древесины, влажность которого необходимо поддерживать на определённом уровне (см. рисунки 5.3.5 и 5.3.6).
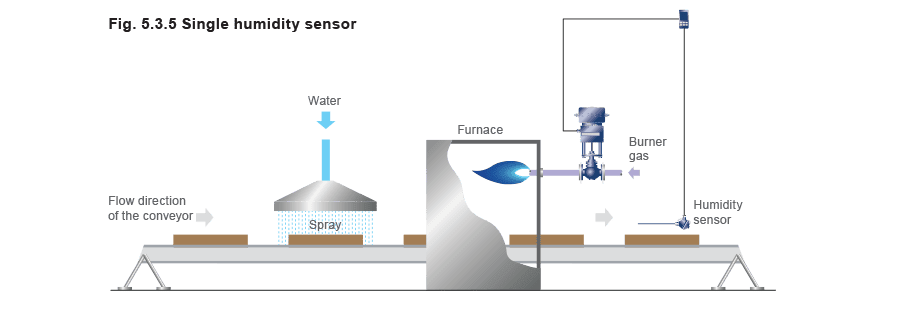
На рисунке 5.3.5 единственный датчик влажности в конце конвейера управляет количеством тепла, подаваемого печью. Но если расход воды в системе орошения изменится, например из-за колебаний давления в водопроводе, то может пройти около 10 минут, прежде чем продукт дойдёт до конца конвейера и датчик влажности отреагирует. Это приведёт к колебаниям качества продукции.
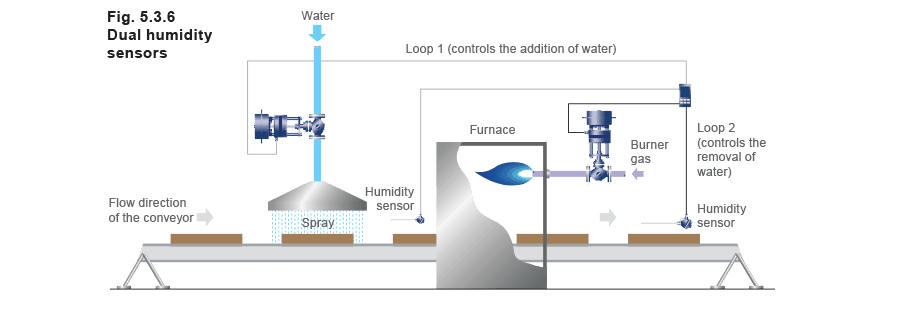
Для улучшения управления второй датчик влажности на другом контуре управления можно установить сразу после водяного распыла, как показано на рисунке 5.3.6. Этот датчик подаёт на контроллер удалённое задание, которое используется для коррекции локального set point. Локальный set point устанавливается по требуемой влажности после печи. В упрощённой форме это и иллюстрирует многоконтурное управление. Эта система управления влажностью состоит из двух контуров:
- Контур 1 регулирует подачу воды.
- Контур 2 регулирует удаление воды. В рамках этого процесса на оба контура воздействуют различные факторы. Некоторые факторы, например давление воды, влияют на оба контура. Контур 1 будет пытаться компенсировать это, но возникающая ошибка всё равно повлияет на контур 2.
Каскадное управление
Каскадное управление
Когда требуется регулировать две независимые переменные с помощью одного клапана, может применяться каскадная система управления. На рисунке 5.3.7 показан сосуд с паровой рубашкой, заполненный жидким продуктом. Основные требования процесса достаточно жёсткие:
- Продукт в сосуде должен быть нагрет до определённой температуры.
- Температура пара не должна превышать определённого значения, иначе продукт может быть испорчен.
- Температура продукта не должна возрастать быстрее определённой скорости, иначе продукт может быть испорчен. Если бы использовалось обычное одноконтурное управление с датчиком в жидкости, то в начале процесса датчик обнаружил бы низкую температуру, и контроллер подал бы команду клапану перейти в полностью открытое положение. Это вызвало бы проблему из-за чрезмерно высокой температуры пара в рубашке.
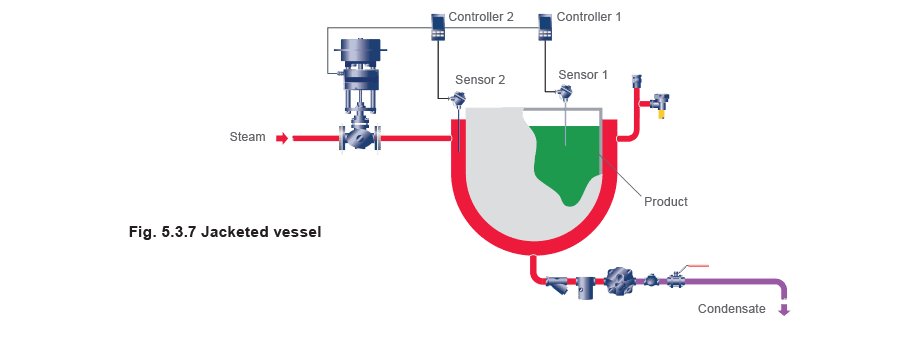
Решением является каскадное управление с двумя контроллерами и двумя датчиками:
- ведомый контроллер (Controller 2) и датчик, контролирующие температуру пара в рубашке и подающие выходной сигнал на регулирующий клапан;
- ведущий контроллер (Controller 1) и датчик, контролирующие температуру продукта, причём выход контроллера направляется на ведомый контроллер;
- выходной сигнал от ведущего контроллера используется для изменения задания на ведомом контроллере, гарантируя, что допустимая температура пара не будет превышена. Пример 5.3.1 Пример каскадного управления технологическим сосудом Температуру жидкости необходимо поднять с 15°C до 80°C и поддерживать на уровне 80°C в течение двух часов. Температура пара ни при каких обстоятельствах не должна превышать 120°C. Температура продукта не должна расти быстрее чем на 1°C/minute. Ведущий контроллер может быть настроен по рампе так, чтобы скорость роста температуры воды не превышала заданную. Ведущий контроллер настроен на обратное действие, так что его выходной сигнал на ведомый контроллер составляет 20 mA при низкой температуре и 4 mA при высокой температуре. Удалённое задание на ведомом контроллере настроено так, чтобы его выходной сигнал на клапан составлял 4 mA при температуре пара 80°C и 20 mA при температуре пара 120°C. Таким образом, температура пара не может быть выше той, которую допускает система, а давление пара в рубашке не может быть выше давления насыщения 1 bar g при 120°C.
Динамика процесса
Динамика процесса
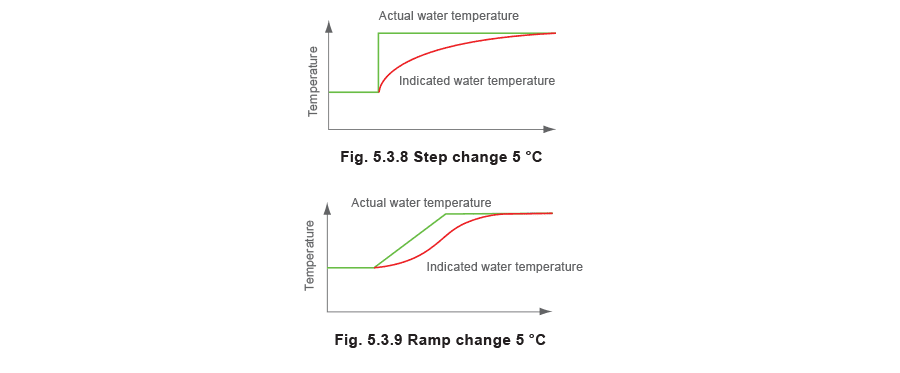
Это очень сложная тема, но в этой части текста будут рассмотрены самые базовые аспекты. Термин 'time constant', связанный с определением времени, необходимого для перемещения привода, уже был рассмотрен в модуле 5.1; но повторим: это время, за которое система управления достигает примерно двух третей своего полного перемещения в результате данного ступенчатого изменения температуры или другой переменной. Другие части системы управления также имеют временные характеристики отклика — контроллер и его компоненты, а также сам датчик. У всех приборов есть временное запаздывание между входным воздействием и последующим выходом. Даже система передачи сигнала имеет своё запаздывание — для электрических / электронных систем это обычно не проблема, но для пневматических систем передачи сигналов это может быть важным фактором. На рисунках 5.3.8 и 5.3.9 показаны типичные задержки отклика термопары, установленной в защитную гильзу для измерения температуры воды.
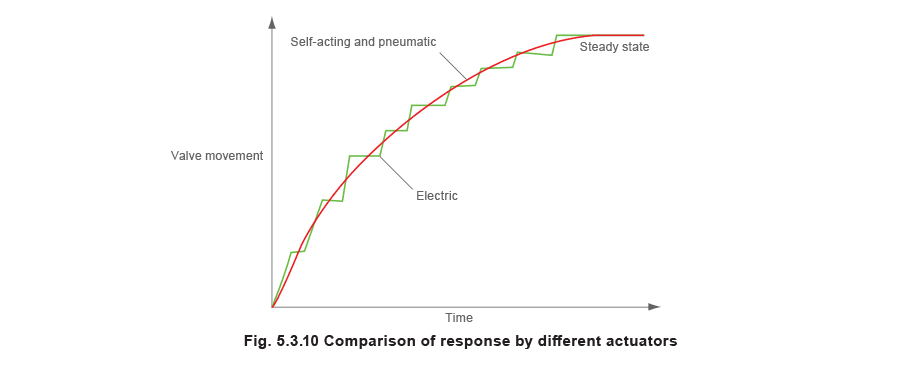
Помимо задержек отклика датчика, на время реакции влияют и другие части системы управления. В пневматических и самодействующих системах движение клапана / привода обычно плавное и в пропорциональном контроллере прямо пропорционально отклонению температуры на датчике.
В электрическом приводе имеется задержка, вызванная временем, необходимым двигателю для перемещения исполнительного механизма. Поскольку управляющий сигнал представляет собой серию импульсов, двигатель перемещает привод рывками, между которыми привод остаётся неподвижным. Это показано на диаграмме отклика (рисунок 5.3.10). Однако из-за задержек отклика самого процесса конечная регулируемая температура всё равно может изменяться плавно.
Системы управления, рассмотренные в этом модуле, описывали только установившиеся режимы. Однако процесс или установка, находящиеся под управлением, могут испытывать изменения по определённым закономерностям. От системы управления требуется, чтобы процесс вёл себя предсказуемо. Если процесс изменяется быстро, то система управления должна уметь быстро реагировать.
Если изменения процесса происходят медленно, требования к скорости работы системы управления не столь жёсткие. Много написано о статическом и динамическом поведении контроллеров и систем управления — чувствительности, времени отклика и т. д. Возможно, самым важным фактором для рассмотрения является запаздывание полного контура управления. Для выбора правильного типа контроллера, датчика и привода необходимо учитывать динамику процесса.
Реакции процесса
Реакции процесса
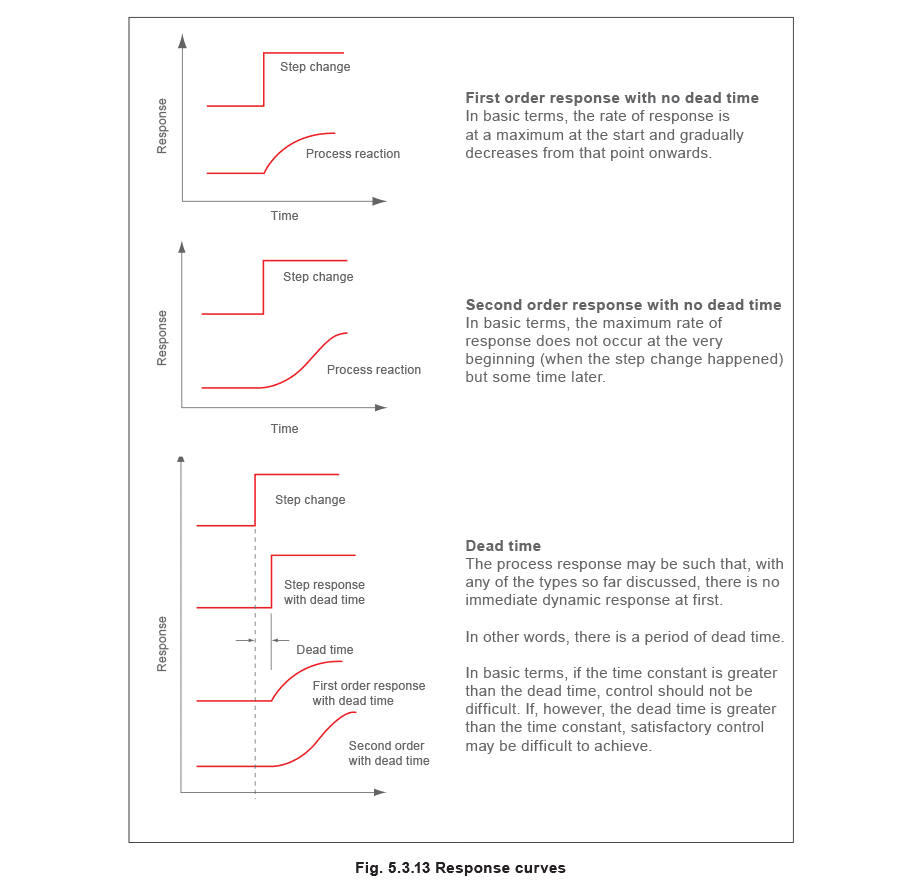
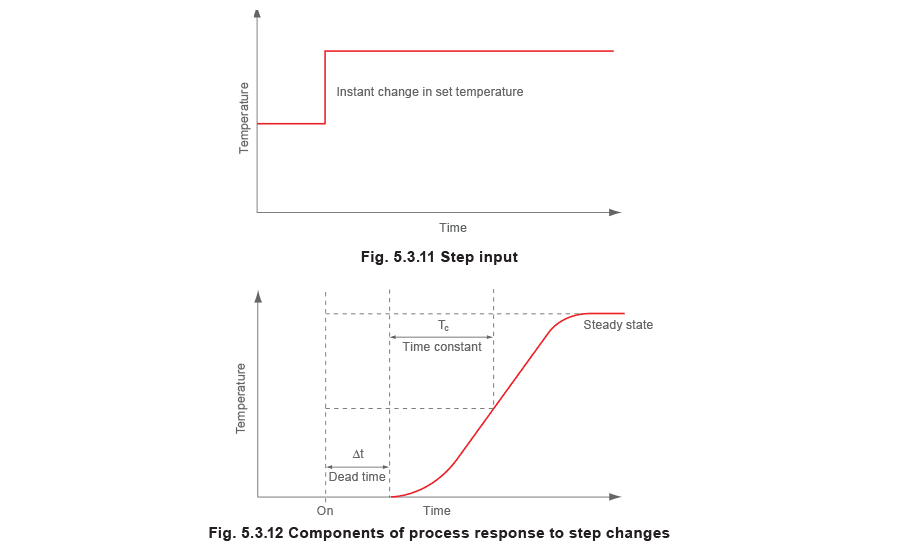
Эти динамические характеристики определяются реакцией процесса на внезапное изменение настроек управления, известное как ступенчатое воздействие. Это может быть, например, мгновенное изменение заданной температуры, как показано на рисунке 5.3.11. Отклик системы показан на рисунке 5.3.12, где видно определённое мёртвое время до начала роста температуры процесса. Это мёртвое время обусловлено запаздыванием управления, вызванным, например, перемещением электрического привода в новое положение. Постоянная времени будет различаться в зависимости от динамического отклика системы и зависеть, в частности, от того, установлен ли датчик в гильзе.
Отклик любых двух процессов может иметь разные характеристики из-за особенностей системы.
Влияние мёртвого времени и постоянной времени на отклик системы при внезапном входном воздействии показано графически на рисунке 5.3.12. Системы, имеющие высокую начальную скорость отклика на входные изменения, обычно называют системами первого порядка. Системы, имеющие медленную начальную скорость отклика на входные изменения, обычно называют системами второго порядка. Обзор основных типов отклика процесса (влияние мёртвого времени, отклик первого порядка и отклик второго порядка) показан на рисунке 5.3.13.