Введение в системы управления
Этот материал представляет собой введение в автоматическое управление, включая базовые элементы системы управления, различные функции управления и соответствующую терминологию, с акцентом на безопасность, устойчивость, а также точность регулирования.
Тема автоматического управления чрезвычайно обширна и охватывает регулирование таких переменных, как температура, давление, расход, уровень и скорость.
Цель этого блока — дать введение в автоматическое управление. Его также можно разделить на две части:
- управление системами Heating, Ventilating and Air Conditioning (обычно обозначаемыми как HVAC); и
- управление технологическими процессами. Обе темы очень велики; последняя охватывает диапазон от управления простой бытовой плитой до полной производственной системы или процесса, как это бывает на крупном нефтехимическом комплексе. Инженер по системам управления должен обладать различными навыками: знаниями в области машиностроения, электротехники, электроники и пневматических систем, рабочим пониманием проектирования HVAC и технологических применений, а также, всё чаще сегодня, пониманием компьютеров и цифровых коммуникаций. Задача этого блока — дать базовое представление о практических и теоретических аспектах автоматического управления, к которым в будущем можно будет добавить другие навыки, а не превратить человека в полноценного Controls Engineer. Этот блок ограничивается управлением процессами, использующими следующие среды: пар, воду, сжатый воздух и горячие масла. Управление обычно достигается изменением расхода среды с помощью клапанов с приводом. Для указанных сред типичной задачей является измерение и компенсация изменений температуры, давления, уровня, влажности и расхода. Почти всегда требуется, чтобы реакция на изменения этих физических параметров происходила в заданное время. Совместное воздействие клапана и его привода во времени, а также точное регулирование измеряемой переменной, будут объяснены далее в этом блоке. Управление потоками не ограничивается клапанами. Некоторые технологические потоки регулируются с помощью насосов или вентиляторов с переменной скоростью.
Необходимость автоматического управления Существует три основные причины, по которым технологические установки или здания нуждаются в автоматическом управлении:
- Безопасность — установка или процесс должны быть безопасны в эксплуатации. Чем сложнее или опаснее установка либо процесс, тем выше необходимость в автоматическом управлении и защитных алгоритмах.
- Устойчивость — установка или процессы должны работать стабильно, предсказуемо и повторяемо, без колебаний и незапланированных остановов.
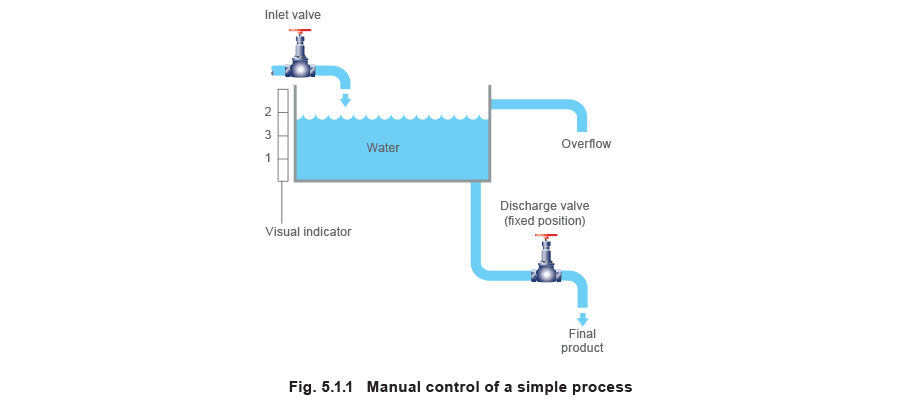
- Точность — это ключевое требование в производстве и зданиях для предотвращения брака, повышения качества и производительности, а также поддержания комфорта. Это основа экономической эффективности. Также важны и другие желательные преимущества, такие как экономичность, быстродействие и надёжность, однако именно по трём основным параметрам — безопасности, устойчивости и точности — оценивается каждое решение по управлению. Терминология автоматического управления В отрасли систем управления используются специальные термины, прежде всего для того, чтобы исключить путаницу. Одни и те же слова и выражения встречаются во всех аспектах систем управления, и при корректном использовании их значение является универсальным. Простая ручная система, описанная в примере 5.1.1 и показанная на рисунке 5.1.1, используется для введения ряда стандартных терминов, применяемых в теории управления. Пример 5.1.1 Простая аналогия системы управления В приведённом примере процесса (рисунок 5.1.1) оператор вручную изменяет расход воды, открывая или закрывая впускной клапан, чтобы обеспечить следующее:
- Уровень воды не должен быть слишком высоким, иначе вода будет уходить через перелив.
- Уровень воды не должен быть слишком низким, иначе вода не будет покрывать дно бака. Результатом этого является то, что вода вытекает из бака с расходом в требуемом диапазоне. Если вода вытекает слишком быстро или слишком медленно, питаемый ею процесс не сможет работать должным образом. На начальном этапе выпускной клапан в сливной линии зафиксирован в определённом положении. Оператор отметил на стенке бака три линии, чтобы по ним регулировать подачу воды через впускной клапан. Эти 3 уровня обозначают:
- Минимально допустимый уровень воды, обеспечивающий покрытие дна бака.
- Максимально допустимый уровень воды, исключающий перелив.
- Идеальный уровень между 1 и 2.
Пример (рисунок 5.1.1) показывает, что:
- Оператор стремится поддерживать воду в сосуде между уровнями 1 и 2. Уровень воды называется регулируемым состоянием.
- Регулируемое состояние достигается управлением расходом воды через клапан во впускной трубе. Этот расход называется регулирующим воздействием, а клапан называют регулирующим устройством.
- Сама вода называется управляющей средой.
- При управлении подачей воды в бак изменяется уровень воды в баке. Изменение уровня воды называется регулируемой переменной.
- После поступления в бак вода называется регулируемой средой.
- Уровень воды, который требуется поддерживать по визуальному указателю, называется заданным значением.
- Уровень воды может поддерживаться в любой точке между 1 и 2 на визуальном указателе и всё равно соответствовать требованиям управления, то есть дно бака будет покрыто, а перелива не будет. Любое значение в этом диапазоне называется требуемым значением.
- Предположим, что уровень строго поддерживается в любой точке между 1 и 2. Это и есть уровень воды в установившемся режиме, называемый значением управления или фактическим значением. Примечание: в пунктах (7) и (8) выше идеальный уровень воды, который следовало поддерживать, находится в точке 3. Но если фактический уровень находится в любой точке между 1 и 2, это всё ещё считается допустимым. Разница между заданным и фактическим значением называется отклонением.
- Если впускной клапан закрыть до нового положения, уровень воды начнёт снижаться, и отклонение изменится. Устойчивое отклонение называется смещением. Элементы автоматического управления
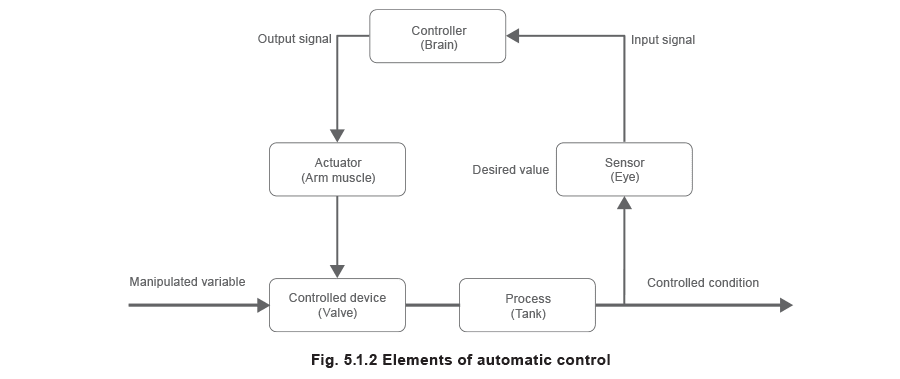
Пример 5.1.2 Элементы автоматического управления
- Глаз оператора обнаруживает движение уровня воды относительно шкалы. Глаз можно рассматривать как датчик.
- Глаз (датчик) передаёт эту информацию мозгу, который замечает отклонение. Мозг можно рассматривать как контроллер.
- Мозг (контроллер) посылает сигнал мышцам руки и кисти, которые можно рассматривать как привод.
- Мышцы руки и кисть (привод) поворачивают клапан, который можно рассматривать как регулирующее устройство. Полезно повторить эти положения немного иначе, чтобы закрепить пример 5.1.2: Простыми словами, задача оператора в примере 5.1.1 — удерживать воду в баке на заранее определённом уровне. Уровень 3 можно считать его целью или заданным значением. Оператор физически регулирует уровень, изменяя положение впускного клапана (регулирующего устройства). При этом необходимо учитывать компетентность и концентрацию оператора. По этой причине маловероятно, что уровень воды всё время будет точно на уровне 3. Обычно он будет находиться чуть выше или ниже уровня 3. Положение или уровень в конкретный момент времени называется значением управления или фактическим значением. Величина ошибки или разницы между заданным значением и фактическим значением называется отклонением. Когда отклонение постоянно, или находится в установившемся режиме, его называют устойчивым отклонением или смещением. Хотя оператор регулирует уровень воды, конечная цель состоит в получении нужного результата — в данном случае требуемого расхода воды из бака. ****Оценка безопасности, устойчивости и точности Можно предположить, что процесс, аналогичный описанному в примере 5.1.1, не содержит ни ценных, ни вредных компонентов. Поэтому перелив или недостаток воды будут безопасными, но неэкономичными и непроизводительными. С точки зрения устойчивости оператор мог бы справляться с этим процессом, если бы постоянно и внимательно следил за ним. Точность не является особенностью этого процесса, потому что оператор может реагировать только на видимую и различимую ошибку. Сводка терминов
| Заданное значение | Значение, установленное на шкале системы управления для получения требуемого состояния. Если для конкретного применения контроллер установлен на 60°C, то 60°C будет называться заданным значением. |
|---|---|
| Требуемое значение | Значение, которое должно поддерживаться в идеальных условиях. |
| Фактическое значение управления | Значение регулируемого состояния, фактически поддерживаемое в установившемся режиме. |
| Отклонение | Разница между заданным значением и фактическим значением управления. |
| Смещение | Устойчивое отклонение. |
| Датчик | Элемент, непосредственно реагирующий на величину регулируемого состояния. |
| Регулируемая среда | Среда, которой управляет система. В качестве регулируемой среды на рис. 5.1.1 выступает вода в баке. |
| Регулируемое состояние | Физическое состояние регулируемой среды. На рис. 5.1.1 регулируемым состоянием является уровень воды. |
| Контроллер | Устройство, принимающее сигнал от датчика и посылающее корректирующий (управляющий) сигнал приводу. |
| Привод | Элемент, изменяющий положение регулирующего устройства в ответ на сигнал контроллера. |
| Регулирующее устройство | Конечный исполнительный элемент системы управления, например регулирующий клапан или насос с переменной скоростью. |
В автоматическом управлении существует ещё много других терминов; они будут объяснены далее в этом блоке.
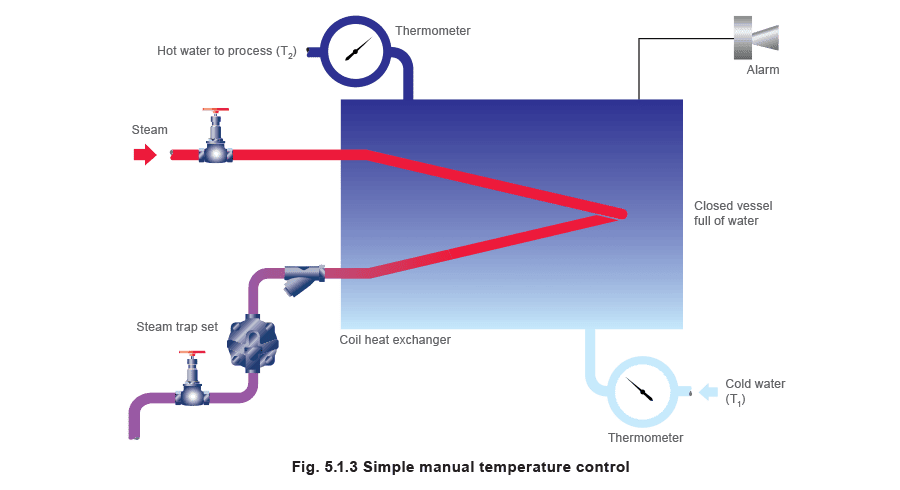
Элементы системы регулирования температуры ****В примере 5.1.1 была показана простая ручная система регулирования уровня. Её можно сравнить с простой системой регулирования температуры, показанной в примере 5.1.3 (ручное управление) и на рисунке 5.1.3. Все предыдущие факторы и определения сохраняют силу. Пример 5.1.3 Изображение простой ручной системы регулирования температуры Задача состоит в том, чтобы подать достаточное количество пара (нагревающей среды) для нагрева поступающей воды от температуры T1, обеспечив, чтобы горячая вода выходила из бака при требуемой температуре T2.
Оценка безопасности, устойчивости и точности Хотя ручное управление, вероятно, может регулировать уровень воды в примере 5.1.1, ручное регулирование температуры по своей природе гораздо сложнее в примере 5.1.3 по нескольким причинам.
Если расход воды изменяется, условия будут быстро меняться из-за большого количества тепла, содержащегося в паре. Реакция оператора при изменении положения парового клапана может оказаться просто недостаточно быстрой. Даже после закрытия клапана в змеевике останется некоторое количество остаточного пара, который продолжит отдавать тепло при конденсации. Предвидение изменений Опыт поможет, но в общем случае оператор не сможет заранее предвидеть изменение. Он должен сначала заметить изменение, затем принять решение и выполнить действие.
Эти и другие факторы, такие как неудобство и стоимость постоянного присутствия оператора, вероятность ошибки оператора, изменения потребностей процесса, требования к точности, быстрые изменения условий и вовлечение нескольких процессов, приводят к необходимости автоматического управления.
Что касается безопасности, в примере 5.1.3 был введён звуковой сигнал тревоги для предупреждения о перегреве — ещё одна причина использовать автоматическое управление. Автоматическое управление Регулируемым состоянием может быть температура, давление, влажность, уровень или расход. Это означает, что измерительным элементом может быть датчик температуры, преобразователь или передатчик давления, датчик уровня, датчик влажности или датчик расхода.
Регулирующим воздействием могут быть пар, вода, воздух, электричество, масло или газ, а регулирующим устройством — клапан, заслонка, насос или вентилятор.
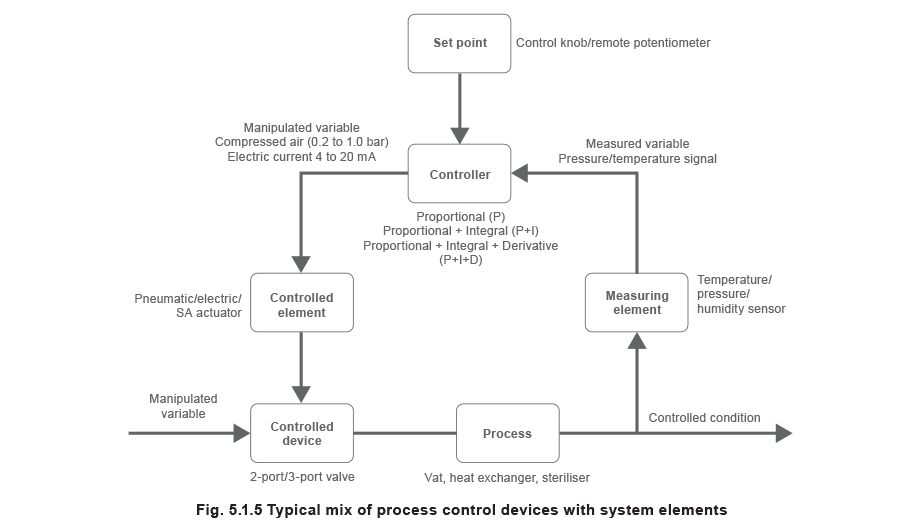
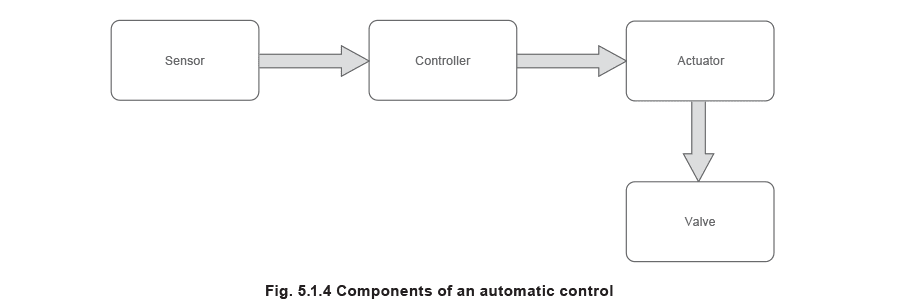
Для демонстрации базовых принципов в этом модуле основное внимание будет уделено клапанам как регулирующим устройствам и температуре как регулируемому состоянию, а измерительным элементом будут температурные датчики. Компоненты автоматического управления На рисунке 5.1.4 показаны составные части базовой системы управления. Датчик передаёт сигнал контроллеру. Контроллер, который может получать сигналы более чем от одного датчика, определяет, требуется ли изменение регулирующего воздействия на основании этих сигналов. Затем он командует приводу переместить клапан в новое положение — более открытое или более закрытое в зависимости от потребности.
Контроллеры обычно классифицируются по источнику энергии, который их питает: электрические, пневматические, гидравлические или механические.
Привод можно рассматривать как двигатель. Приводы также классифицируются по источникам энергии аналогичным образом. Клапаны классифицируются по принципу действия, используемому для открытия или закрытия проходного сечения потока, а также по конфигурации корпуса, например по наличию поступательного штока или вращательного движения. Если объединить элементы системы с её устройствами, становится видна связь между вопросами «Что нужно сделать?» и «Как это делается?». Некоторые из использованных терминов могут пока быть незнакомы. Однако в следующих частях блока 5 все отдельные компоненты и элементы, показанные на предыдущем рисунке, будут подробно рассмотрены.